机器人操作系统
第一章
介绍
ros由一组工具软件构成,是一个元操作系统,特点:
- 消息传递接口:进程通信
- 硬件抽象:无需关注具体硬件
- 包管理:ros节点以包的形式组织起来,每个包由原码文件、配置文件、编译文件等构成
- 第三方库集成:Open-CV, PCL, Open-NI等
- 低级设备控制:控制I/O pin, 端口传数据
- 分布式计算:将计算任务分布到几块计算节点上
- 代码复用
- 语言独立:可用python, c++, Lisp
- 易测试:内建测试框架
- 扩展
- 免费
ROS概念
$组织等级\left{\begin{aligned}
& ros文件系统\
& ros计算图\
& ros社区
\end{aligned}
\right.$
ros文件系统:ros文件在硬盘中如何组织
- package: ros包是ros框架下的个体单元,包含了:原码、第三方库、配置文件
- package manifests: 是一个*.xml文件记录了包的全部细节,例如:名字、描述、依赖
- message type: 是一个数据结构,定义*.msg文件中,该文件放在msg文件夹下
- service type: 是一个请求/应答服务,定义在*.srv文件中,该文件放在srv文件夹下
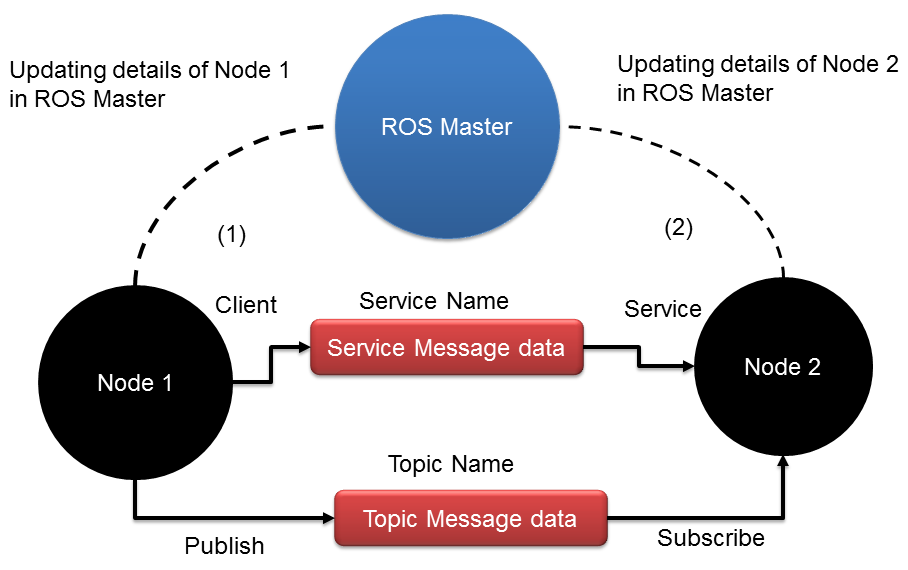
ros计算图:计算图是一个点对点的网络,基本特征有:节点node、主进程ros master、参数服务parameter server、ros对话ros topic、 消息message、服务service、袋bag
- 节点:表示进程
- 主进程:串联各个节点进程
- 参数服务:全局变量,所有进程都可访问
- ros话题:一对多通信模式(广播)在进程间通信,发送话题称为发表publish,接收话题称为订阅subscribe
- 服务:一对一通信模式(请求/回复)在进程间通信,发送请求端称为客户 client,回复响应端称为服务service
- 袋:通信格式
ros社区等级
- $分布distribution:发布版本\left{\begin{aligned}
& ROS Melodic Morenia & &2018.05.23\
&ROS Lunar Loggerhead & &2017.05.23\
& ROS Kinetic Kame & &2016.05.23\
& ROS Indigo Igloo & &2014.07.22
\end{aligned}
\right.$ - 仓库repositories:git
- 维基wiki:http://wiki.ros.org
- 邮件mail list:http://lists.ros.org/mailman/listinfo/ros-users
- 解答answer:https://answers.ros.org/questions/
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 和其光, 同其尘!
评论
ValineDisqus