目标识别
基于深度学习的视觉目标检测技术综述
作者:曹家乐,2022
发展历程
- 基于手工设计特征的方法
- 支持向量机
- AdaBoost
- Haar特征(Viola, 2004)
- 方向梯度直方图histograms of oriented gradients(Dalal, 2005)
- 深度学习
- 区域卷积神经网络region-based convolutional neural network, R-CNN (Girshick, 2014)
- 单次检测single shot detector, SSD (Liu, 2016)
- yolo (Redmon, 2016)
- detection transformer, DETR (Carion, 2020)
深度网络模型:
- AlexNet(Krizhevsky,2012)
- GoogLeNet(Szegedy,2015)
- VGGNet(Simonyan,2015)
- ResNet(He,2016)
- DenseNet(Huang,2017)
- Mobilenet(Howard,2018)
- ShuffleNet(Zhang,2018)
- SENet(Hu, 2018)
- EfficientNet(Tan,2019)
- ViT(Dosovitskiy,2021)
- Swin(Liu,2022)
目标检测方法
- DetectorNet(Szegedy,2014)
- R-CNN(Girshick,2014)
- OvearFeat(Sermanet,2014)
- SPPNet(He,2015)
- Fast R-CNN(Girshick,2016; Ren,2016)
- YOLO(Redmon,2016)
- SSD(Liu,2016)
- R-FCN(Dai,2017)
- FPN(Lin,2017)
- YOLOv2(Redmon,2017)
- Mask RCNN(He,2018)
- DCN(Dai,2018)
- RetinaNet(Lin,2018)
- Cascade RCNN(Cai,2018)
- YOLOv3(Redmon,2019)
- CornerNet(Law,2019)
- FCOS(Tian,2020)
- CenterNet(Zhou,2020)
- EfficientDet(Tan,2020)
- ATSS(Zhang,2020)
- MoCo(He,2020)
- YOLOv4(Bochkovskiy,2021)
- Deformable DETR(Zhu,2021)
- DETR(Carion,2021)
- YOLOv5(Jocher,2021)
- UP-DETR(Dai,2021)
- Pix2seq(Chen,2022)
检测设备
- 单目相机
- 双目相机 (提供三维信息)
基于单目相机流程及其涵盖的方法
数据预处理
- 翻转
- 放缩
- 均值归一化
- 色调变化
- 剪切、擦除、分区(DeVries, 2017; Zhong, 2020b; Singh, 2017; Chen, 2020a)
- 混合(Mixup: Zhang, 2018; CutMix: Yun, 2019; Fang, 2019; Mosaic: Bochkovskiy, 2020; Montage: Zhou, 2020; dynamic scale training: Chen, 2020b)
检测网络
- 基础骨架
- AlexNet(Krizhevsky, 2012)
- VGGNet(Simonyan, 2014)
- ResNet(He, 2016)
- DenseNet(Huang, 2017)
- Transformer(Vaswani, 2017), ViT(Dosovitskiy, 2021; Beal, 2020), Swin(Liu, 2021c), PVT(Wang, 2021c)
- 特征融合
- 特征金字塔(Lin, 2017a)
- 预测网络(分类回归任务)
- 两阶段目标检测:全连接
- 单阶段目标检测:全卷积
- 基础骨架
标签分配与损失计算
标签分配准则
- 交并比准则
- 基于锚点框与真实框的交并比
- 距离准则
- 基于无锚点框 ,点到物体中心的距离
- 似然估计准则
- 分类、回归
- 二分匹配准则
- 分类、回归
- 损失函数
- 交叉熵函数
- 聚焦损失函数(Lin, 2017b)
- 回归损失函数: L1损失函数、平滑L1损失函数、IoU损失函数、GIoU损失函数(Reztofighi, 2019)、CIoU损失函数(Zheng, 2020b)
- 交并比准则
后处理:为每个物体保留一个检测结果,去除冗余结果
- 非极大值抑制NMS
- soft-NMS(Bodla, 2017)
- IoUNet(Jiang, 2018)
- 定位方差(He, 2018)
- 上下文推理(Pato, 2020)
基于锚点框方法
描述:为空间每个位置设定多个矩形框(框的尺度和长宽比),尽可能的涵盖图像中的物体
分类:
- 两阶段目标检测
- 提取k个候选框
- 对候选框分类和回归
- 单阶段目标检测
- 直接对锚点框分类和回归
基于无锚点框方法
分类:
- 基于关键点目标检测:多个关键点集成到物体上
- 基于内部点目标检测:物体内部点到物体边界的上下左右偏移量
基于双目相机流程及其涵盖的方法
方法流程与单目相同
基于直接视锥空间
描述:直接使用基础骨干提取的两个单目特征构造双目特征。
方法:
- 串接特征构造
不改变原单目特征的坐标空间 - 平面扫描构造
通过逐视差平面或者深度平面地扫描一对2维特征,所得三维特征即是匹配代价体
基于显式逆投影空间
描述:将存在尺度变化和遮挡问题的视锥空间图像逆投影到尺度均匀、不存在重叠遮挡的3维空间,从而缓解视锥投影产生的问题。
方法:
- 基于原始图像视差的逆投影方法
先利用双目视差估计算法预测每个像素的视差,将像素的视差逆投影到三维空间生成电云,最后利用点云的3维检测方法进行目标检测 - 基于特征体的逆投影方法
通过插值和采样将平面扫描得到的匹配代价体变换到3维空间,利用了图像特征提供的颜色和纹理信息。 - 基于候选像素视差的逆投影方法
仅聚焦感兴趣目标区域的三维空间,先利用实例分割方案得到目标的前景像素,然后生成仅含前景区域的3维空间。
发展趋势
- 高效的端到端目标检测transform,加快收敛,减少计算资源。
- 基于自监督学习的目标检测,目标检测任务存在数量和尺度不确定的物体。
- 长尾分布目标检测,现实世界物体类别数量庞大且不同类别的物体数量存在极度不平衡。
- 小样本、0样本目标检测能力的提高
- 大规模双目目标检测数据集少,需要标注物体的2维和3维信息以及相机标注视差和相机参数,还需完善评价体系和开放测试平台
- 弱监督双目目标检测
YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors
作者:Chien-Yao Wang,2022
解决的问题
发现的问题:
- 模型再参数化
- 用动态标签分配技术后,如何将动态标签分配给模型的不同输出层
本篇文章解决的问题:
- 最高推理精度56.8%AP和最快推理速度160FPS,都达到最高水平,参与对比的模型有:YOLOv5、YOLOX、Scaled-YOLOv4、YOLOR、PPYOLOE、DETR、Deformable DETR、DINO-5scale-R50、ViT-Adapter-B、SWIN-L Cascade-Mask R-CNN、ConvNeXt-XL Cascade-Mask R-CNN
- 支持移动GPU以及边缘端和云端GPU
- 设计trainable bag-of-freebies方法,既可增强训练代价提高检测准确度又不增加推理代价
- 提出planned re-parameterized model
- 提出新的标签分配方法,coarse-to-fine lead guided label assigment
- 提出extend and compound scaling方法,减少40%的模型参数和50%计算时间
其他模型的优点和不足:
- YOLOX和YOLOR只改进各种GPU推理速度
- 基于MobileNet, ShuffleNet, GhostNet针对CPU设计
- ResNet, DarkNet, DLA, CSPNet针对GPU设计
- YOLO和FCOS具有:1、快而强壮的网络架构,2、高效的特征集成方法,3、鲁棒的损失函数,4、高效的标签分配方法,5、准确的检测方法,6、高效训练方法
当前的不足
使用的方法
模型再参数化
模型再参数化:融合多个计算模块于一体,可是为组装技术
- 模型间组合方法
- 在不同训练集中训练多个相同模型,然后再平均模型的参数
- 在不同的迭代次数间进行模型参数均值化
- 模块间组合方法
在训练期间将一个模块分解成多个分支模块,在推理时将多个分支模块整合成一个完整模块
模型缩放
模型放缩可以增大和缩小模型使它适合不同计算能力的设备,满足不同的推理速度。
放缩方法:网络架构搜索Network architecture search(NAS),折中了网络参数大小、计算时间、推理速度和精确性
放缩因子的影响:
- 对基于非连接的网络架构,在进行模型放缩时由于每个隐藏层的入度和出度不被改变因此可以独立分析每个放缩因子对模型参数数量和计算速度的影响
- 对基于连接的网络架构,在进行模型隐藏层深度放大或缩小时紧跟在计算模块后的转移/转化模块的入度会减小或增大,不能独立分析单个尺度因子的影响必须一起分析
- 文章提出compound scaling method合成尺度方法既可保持原有模型的的性质又可保持最优结构
架构
选取架构主要考虑1、模型参数数量,2、计算量,3、计算密度
采用Extended-ELAN(E-ELAN)扩展高效层聚合网络架构,该架构使用扩展基数层、清洗基数层、合并基数层增强网络学习能力
基于早期版本的YOLO框架和YOLOR框架作为基本框架
可训练赠品袋trainable bag-of-freebies
- 计划再参数化卷积
- 如何将再参数化卷积和不同的网络结合?
- 提出planned re-parameterized convolution
- 提出无identity connection的RePConv构造planned re-parameterized convolution
- 用RepConvN网络层替换3堆叠ELAN架构中不同位置处的3x3卷积层
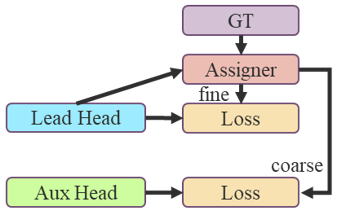
- 以粗为辅以精为主的损失值
- 深度监督是在网络的中间层添加额外的辅助头,将带有损失值信息的浅层网络权重作为引导方式
- 将负责最后输出的头称为主头,将用于协助训练的头称为辅头
- 采用软标签即使用网络预测输出的性质和分布和考虑实际标签,使用一些计算和优化方式生成可靠的标签
- 如何分配软标签到主头和辅头?
- 分别计算主头和辅头预测结果,使用各自的分配器结合实际结果制作各自标签,再通过各自标签和头计算损失
- 文章提出经分配器用主头和实际结果制作由粗到精的等级标签,再将这些等级标签用在主头和辅头上计算损失值
- 批归一化放到conv-bn-activation 拓扑结构中
- YOLOR的隐性知识以串行和并行方式结合到卷积特征图中
- EMA模型
yolo2/3//4
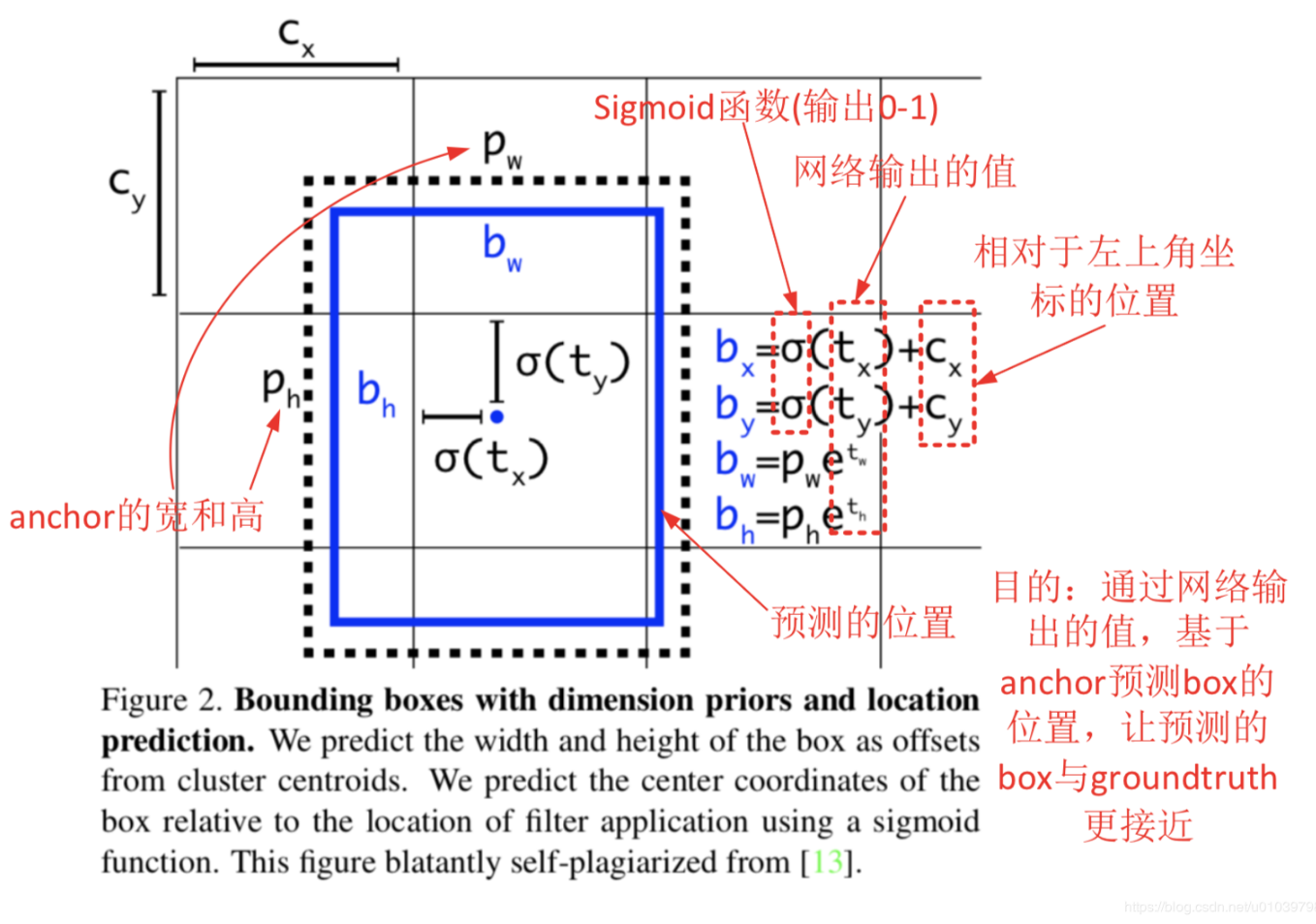
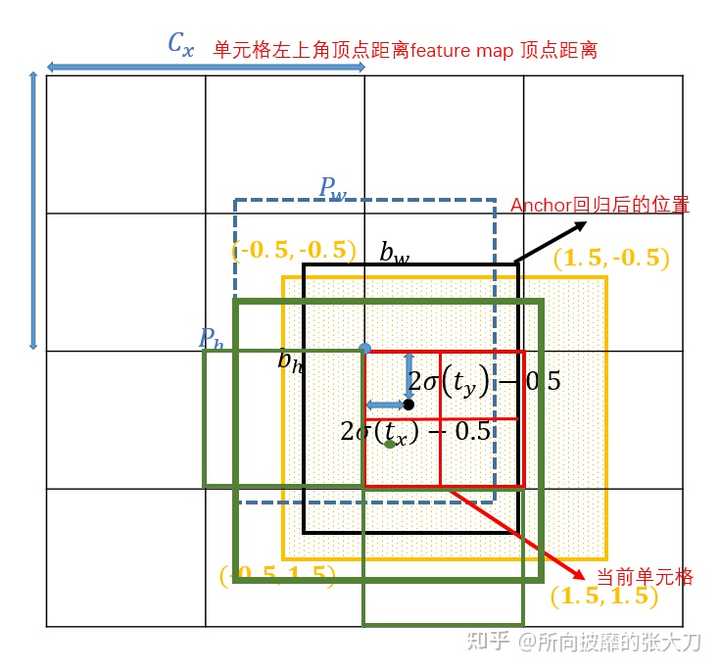
anchor回归时,长宽回归同faster RCNN,中心点回归不是基于anchor中心点,而是基于所在grid左上角坐标的偏移值,偏移值也是相对于grid长宽的一个相对值,怎么样知道用哪个grid呢,yolov3 有三个网络层,对应9个anchor,从小到大,三个anchor对应一个网络层,在训练时,先计算anchor与gt的IOU(计算IOU值时不考虑坐标,只考虑形状,因为anchor没有坐标xy信息,所以先将anchor与ground truth的中心点都移动到同一位置(原点),然后计算出对应的IOU值),IOU值最大的那个先验框anchor与ground truth匹配,该anchor所对应的网络层用来训练该gt, 该gt的中心点落在该网络层的哪个grid上,对应grid上的之前IOU匹配最大的那个anchor作为正样本,训练预测这个ground truth。(这与faster RCNN中训练时,只要与gt的IOU大于阈值的均为正样本不同,yolov3 训练的正样本为与gt IOU值最大的那个anchor).
在推理时,根据模型学习的权重得到信息提取特征P,基于学习的权重值得到$t_x$,$t_y$,$t_w$,$t_h$,为了将边界框中心点约束在当前网格中,使用sigmoid函数来处理偏移值,使预测偏移值在(0,1)范围内,即保证中心点在该grid范围内,得到 , ,再根据映射到原图上的anchor得到的候选框对各个框缩放,长宽缩放使用exp函数的原因同faster RCNN,得到大量的预测框,如上图所示将得到13133个候选框,再通过后处理过滤得到 的预测框。所以在yolov3中BBR中,只有回归的长宽与anchor的长宽有关,回归的坐标回归与grid有关。
yolo5
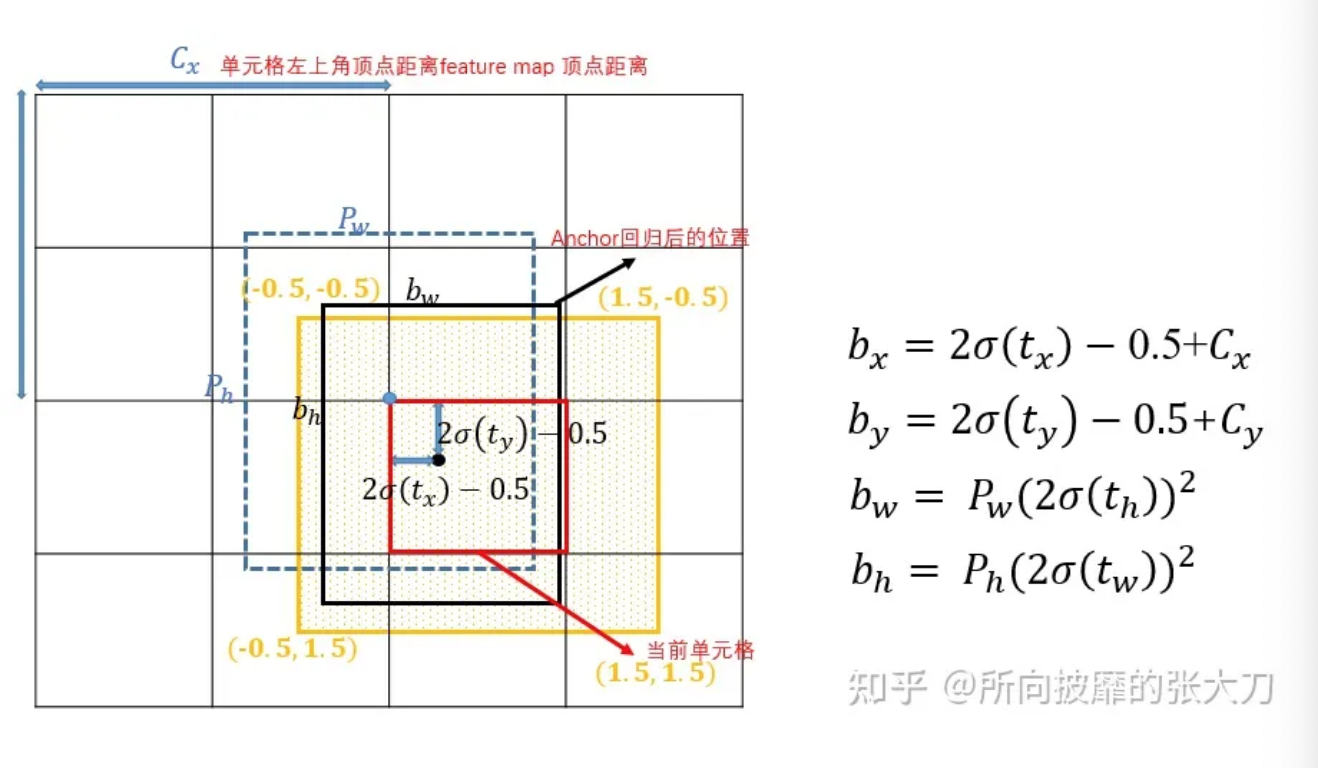
- 宽高的计算:( $t_w$,$t_h$)要经过sigmoid函数处理,但上面的Yolov2/3/4只对($t_x$ ,$t_y$ )进行sigmoid函数处理,对( $t_w$ , $t_h$)不进行sigmoid函数处理,同时对( $t_w$ , $t_h$ )进行2倍的sigmoid,宽高的回归也从之前的$\exp$函数改成 $\left(2\sigma\left( t_w \right) \right)^2$ ,主要原因是在于作者认为原始的yolo /darknet框方程式存在严重缺陷,宽度和高度虽然永远>0,但不受限制,因为它们只是out=exp(in),这种指数的运算很危险,易导致梯度不稳定,训练难度加大,使用 $\left(2\sigma\left( t_w \right) \right)^2$既能够保证宽高>0,也能对宽高限制,最大值为anchor框宽高的4倍(这里有个疑问是如果要对宽高限制,为啥不直接用$4\sigma\left( t_w \right)$,猜测是作者做了对比试验,发现这样更好)。
偏移的计算:Yolov5相对于该grid左上角坐标的偏移量的计算公式如下,$2\sigma\left( t_x \right) -0.5 $ ,先对$\left( t_x , t_y\right)$ sigmoid处理后,再对其两倍计算后减去0.5,这样中心点的位置则可能出现在如下图的黄色区域内。
匹配规则变化:从IOU匹配变成shape匹配,先计算gt与9个anchor的长宽比,如果长宽比小于设定阈值,说明该gt和对应的anchor匹配,一个gt可能与几个anchor均能匹配上,因为同之前yolo一样,yolov5有三层网络,9个anchor, 从小到大,每3个anchor对应一层网络,所以一个gt可能在不同的网络层上做预测训练,大大增加了正样本的数量,当然也会出现gt与所有anchor都匹配不上的情况,这样gt就会被当成背景,不参与训练,说明anchor框尺寸设计的不好。
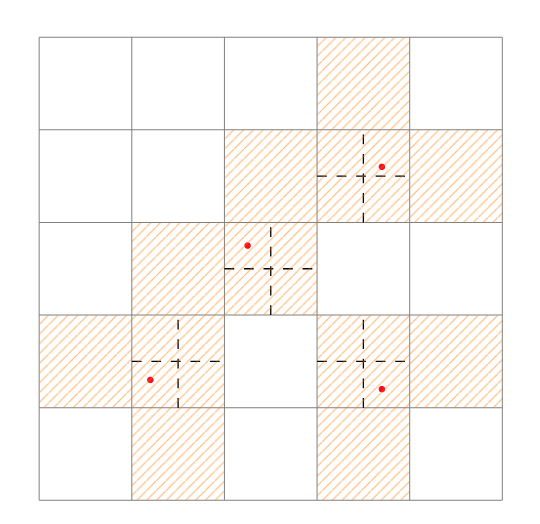
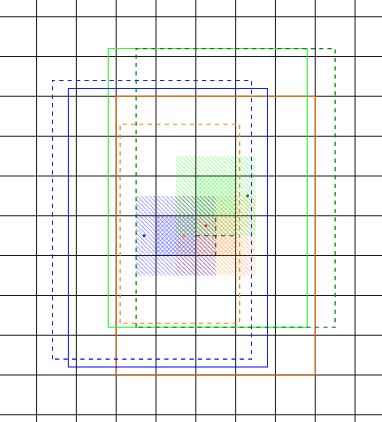
- 筛选框变化:gt框与anchor框匹配后,得到anchor框对应的网络层的grid,看gt中心点落在哪个grid上,不仅取该grid中和gt匹配的anchor作为正样本,还取相邻的的两个grid中的anchor为正样本,如下图所示,绿色的gt框中心点落在红色grid的第三象限里,那不仅取该grid,还要取左边的grid和下面的grid,这样就有三个正样本,同时gt不仅与一个anchor框匹配,如果跟几个anchor框都匹配上,而且anchor不在同一个网络层上,所以可能有3-9个正样本,增大正样本数量。
损失函数部分
一、 build_targets函数
args:
- 预测张量:{(尺度=nl, 批量=bs, 锚点=na, y轴网格=ny, x轴网格=nx, x+y+w+h+conf+class)}
- 目标张量:{(目标=m, image_index=1+class_index=1+xywh=4)}
输出:
- tcls:{(尺度=nl, 选3网格(5网格*选和锚点边框像的(anchors=na*目标=m) ) )}
- tbox:{(尺度=nl, 选3网格(5网格*选和锚点边框像的(anchors=na*目标=m) ), 目标中心距选定的3个网格左上角偏差xy=2+目标边框wh=2)}
- indices:{(尺度=nl, image_index=1+anchor_index=1+grid_y=1+grid_x=1, 选3网格(5网格*选和锚点边框像的(anchors=na*目标=m) ) )}
- anch:{(尺度=nl, 选3网格(5网格*选和锚点边框像的(anchors=na*目标=m) ), p_wp_h=2):元素锚点长宽}
功能:
将目标张量增加一阶锚点,目标张量:{(锚点=na, 目标=m, image_index=1+class_index=1+xywh=4)}
对每个目标添加锚点序号,ai:{(anchors=na,目标=m):元素锚点序号}
对目标张量的每个目标的所有锚点在最后一阶处添加锚点索引维度,目标张量:{(锚点=na, 目标=m, image_index=1+class_index=1+xywh=4+anchor_index)}目标边框的x,y,w,h归一化到特征图的网格数nx,ny上
筛选网格:根据目标边框的形状和锚点边框形状偏差小于阈值
- 将目标张量的宽高和锚点宽高做比值,r:{(anchors=na,目标=m,ratio_w=1+ratio_h=1)}
- 统一偏差形式max(r,1/r):偏差>=1, ratio_w和ratio_h中选一个偏差最大的
- 筛选最大偏差小于阈值的那些锚点和目标
- 目标张量:{(选和锚点边框像的(anchors=na*目标=m),image_index=1+cls=1+xywh=4+anchor_index=1)}
筛选网格:根据目标边框中心点所在网格内的方位(4方位)给出3个网格点
- 目标张量中提取边框中心xy,gxy:{(选和锚点边框像的(anchors=na*目标=m),xy=2)},用于筛选左、上网格
- 计算逆坐标,gxi:{(选和锚点边框像的(anchors=na*目标=m),xy=2)}, 用于筛选右、下网格
- gxy落在网格4方位的掩码,gxy%1. < 0.5,拆分为左j,上k
- gxi落在网格4方位的掩码,gxi%1. < 0.5, 拆分为右l,下m
- 拼接成增添网格掩码, mask:{(本网格=1+右网格=1+下网格=1+左网格=1+上网格=1, 选和锚点边框像的(anchors=na*目标=m)):第0阶第0维元素全1,第0阶其余维元素是布尔}
- [本网格,左,上,右,下]
情况4:[ 1, F, F, T, T]
情况3:[ 1, T, F, F, T]
情况2:[ 1, F, T, T, F]
情况1:[ 1, T, T, F, F]
- gxy落在网格4方位的掩码,gxy%1. < 0.5,拆分为左j,上k
- 目标张量增添一阶表示选定的网格,目标张量:{(5网格=5,选和锚点边框像的(anchors=na*目标=m),image_index=1+cls=1+xywh=4+anchor_index=1)}
- 用掩码筛选目标张量内容,目标张量:{(选3网格(5网格*选和锚点边框像的(anchors=na*目标=m) ), image_index=1+cls=1+xywh=4+anchor_index=1)}
- 筛选到的3网格相对中心网格的偏差表达,offset:{(选3网格(5网格选和锚点边框像的(anchors=na目标=m) ), 网格1偏移xy=2)}
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
二、初始化函数
输入:模型
功能:
- 类别损失函数:BCEWithLogitsLoss
- 边框损失函数:BCEWithLogitsLoss
- 应对样本不均衡将上述损失函数嵌套入焦点损失函数FocalLoss
++++++++++++++++++++++++++++++++++++++++++++++
三、调用函数
输入:
- 预测张量:{(目标=m,image_index=1+cls=1+xywh=4)}
- 目标张量:{(nl,bs,na,ny,nx,x+y+w+h+conf+nc)}
功能:
- 根据从目标筛选出的网格信息找到预测变量中的输出信息
- 计算回归边框损失,本次计算是采用相对坐标,而detection网络中的回归计算是包含网格坐标和尺度信息的绝对坐标,(目标边框坐标是相对特征图原点的绝对坐标,而预测边框坐标是相对网格左上点的坐标,所以需统一到底是使用那种坐标系)
- 根据目标张量中筛选的网格找到预测张量对应的网格
- 计算每个筛选到的网格给的预测边框和目标边框交并比
- 计算所有筛选网格给的交并比损失值的平均值
- 累加各尺度特征图片计算出的交并比损失值的平均值
- 计算目标损失
- 根据预测置信度张量的形状设计目标置信度张量的形状
- 目标置信度张量在筛选出的网格记录的图片序号、特定锚点号、网格坐标位置处设置加权的iou损失值,其他位置处设置的值是0
- 计算预测置信度张量和目标置信度张量之间的交叉熵
- 各尺度上所有网格上计算的置信度交叉熵的加权累加值
- 类别损失
- 将目标张量的类别子张量从索引号形式转换成预测张量中类别子张量的one-hot形式:根据筛选网格后的预测变量中提取类别one-hot矢量信息,设置一个同形状的目标类别张量
- 根据筛选网格后的目标张量中的类别索引号索引目标类别张量中one-hot类别矢量对应的位置,并在该位置设置正类别值,而在其他位置处设置负类别值
- 计算预测类别张量和目标类别张量之间的交叉熵损失
- 累加各尺度交叉熵损失
四、目标和网格之间的分配策略:
- 每个目标匹配固定3个网格
- 目标内的网格只能计算自己目标上的损失值
- simOTA方法:
- 每个目标匹配固定3个网格
- 输出各目标和全部网格二元组上的预测信息x,y,w,h,conf,class
- 计算每个网格给出的边框中心和高宽的绝对大小,(有的网格上的计算边框可能与其他目标边框重叠面积比自身目标重叠面积更多,目标边框坐标是相对特征图原点的绝对坐标,而预测边框坐标是相对网格左上点的坐标)
- 计算目标边框和各网格预测边框之间的交并比
- 计算交并比损失值
- 对每一个目标筛选k个网格,这些网格同目标计算的交并比从大到小
- 对每一个目标累加k个网格上计算的交并比(累加值越大说明有更多其他网格预测了该目标)
- 输出各目标和全部网格二元组的目标信息x,y,w,h,class
- 对每个目标和网格二元组计算类别损失
- 对每个目标和网格二元组计算总损失(类别+iou)
- 根据每个目标上不同的累加交并比,对每一个目标筛选不同数量的网格,这些目标和网格二元组给出的总损失是从小到达
- 如果目标和网格二元组中,同一网格对应了多个目标,就将该网格唯一匹配使目标和网格二元组计算的损失值最小的那个目标
五、辅助损失函数
- 两种target_build函数,主头是找3网格,辅头是找5网格
想的不对,辅头5网格其中的3网格
剩余2网格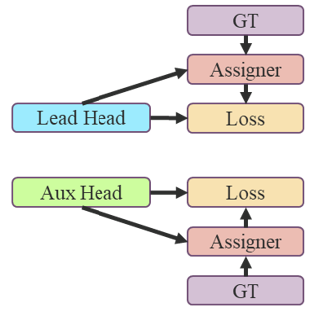
应该是主头预测特征参与目标分配过程,否头和主头都使用该分配结果
六、创新点
- 预测边框和目标边框分别计算所围图片区域中的相似性(颜色、纹理、区域大小、区域间隙)
- 根据相似性分割区域,筛选m个距边框中心点最近的区域
- 在辅头中添加相似性损失
- 在主头中根据相似性诱导的区域进行transformer相关性计算,然后融合到卷积特征中
- 在原有卷积框架中,替换部分conv为x-volution
AN IMAGE IS WORTH 16x16 WORDS: TRANSFORMERS FOR IMAGE RECOGNITION AT SCALE
作者:Alexey Dosovitskiy, 2021
解决的问题
根据Transformer计算的效率和可扩展性以及借鉴Transformer在自然语言方面取得的成功将其应用于图像上
- 证明在大样本上14M-300M图,Transformer胜过CNN
- 可以处理中等分辨率图像
- 在更大规模数据集而非ImageNet数据集,探索图像识别
前人工作优点和不足:
- 把CNN框架和自注意力结合(Wang,2018; Carion, 2020)
- 用自注意力替换整个卷积网络(Ramachandran, 2019; Wang, 2020a)
- ResNet架构在大尺度图片识别上是效果好的(Mahajan, 2018; Xie, 2020; Kolesnikov, 2020)
- transformer用于机器翻译(Vaswani, 2017)
- 将transformer用到图像处理环境中
- 只将自注意力应用于代查询像素的局部临域中,并非全局应用(Parmar,2018)
- 局部多头点积自注意力块完全替换卷积(Hu,2019; Ramachandran, 2019; Zhao, 2020)
- 稀疏Transformer在全局自注意力中使用放缩近似以适应图片(Child, 2019)
- (Cordonnier, 2020)提出的模型也是ViT但是没有证明大规模预训练模型可以甚至超过CNN模型,使用的2x2块太小只能适应小分辨率图像
- (Sun, 2017)研究CNN性能如何随数据集大小变化
- (Kolesnikov,2020; Djolonga,2020)从大规模的数据集上探索CNN的迁移学习
当前的不足
- Transformer和CNN相比缺少偏移量无法实现平移等变映射和无法进行局部化,因此在小样本中泛化能力弱
- 应用ViT到其它计算机视觉任务,例如目标检测和分割
- 持续开发自监督与训练方法
使用的方法
- 分割图片成若干块,给这些块提供顺序线性嵌入体,并将嵌入体作为Transformer的输入
- 选用原始Transformer(Vaswani, 2017)
- 框架
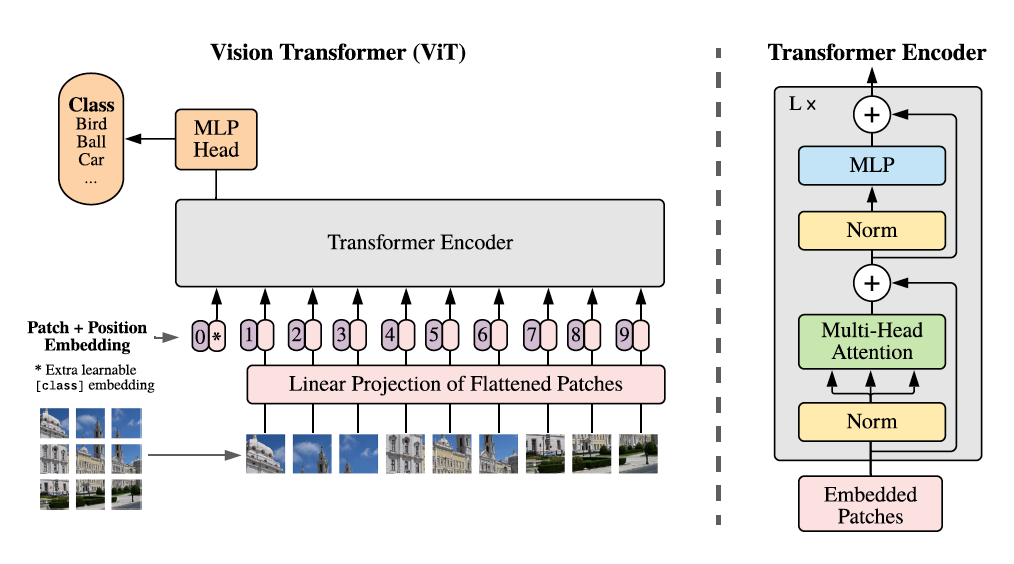
标准Transformer接收1维符号嵌入序列,将图像$x\in\mathbb{R}^{H\times W\times C}$分割成有序排列小块$xp\in\mathbb{R}^{N\times(P^2\cdot C)}$,输入$z_0=[x{class}; xp^1E; x_p^2E; \cdots; x_p^NE]+E{pos}$, $x{class}\in\mathbb{R}^{1\times D}$, $E\in \mathbb{R}^{(P^2\cdot C)\times D}$, $E{pos}\in\mathbb{R}^{(N+1)\times D}$
Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions
作者:Wenhai Wang, 2021
解决的问题
- 文章(PVT)解决将transform移植到密集预测任务的问题
- 产生高输出分辨率,利用收缩的金字塔减少计算量
- PVT继承了CNN和Transformer的优点,成为应对各种视觉任务的无需卷积的统一骨干架构,可以直接替换CNN骨干架构
- 提高下游任务的性能,包括:目标检测,实例分割,语意分割
- 克服传统transformer问题方式
- 采用获取精细图像块(每个图像块为4x4像素)作为输入,以学习高分辨率的表示
- 采用逐渐缩小的金字塔形式减小transformer在深层网络中的序列长度,以减小计算量
- 采用空间减小注意力层spatial-reduction attention(SRA), 这近一步在学习高分辨率特征时减小资源损耗
- 具有的优点
- CNN的局部接收视野随网络深度的增加而增加,PVT产生的是全局接收视野,这有利于检测和分割任务
- 借助金字塔结构的优势,易于将PVT插入到许多代表密集预测的管道中,例如RetinaNet和Mask R-CNN
- 通过结合PVT和其它特殊任务的Transformer解码器可以构建无卷积的管道,例如PVT+DETR用作目标检测
前人的工作及优缺点
Vision Transformer(ViT)被用作分类任务
Vision Transformer(ViT)是一种柱状机构具有粗糙的输入图像块,不是很适合像素级别的致密预测任务如目标检测和分割任务,原因有:1、输出的特征图是单一尺度,分辨率低;2、高计算和内存占用成本,
CNN在视觉上取得巨大成功(Karen,2015; Kaiming,2017; Saining,2017)
将视觉任务建模成具有可学习查询功能的字典查找问题,使用Transformer解码器作为特殊任务的头应用于卷积框架的顶层(Nicolas,2020; Christian,2017; Enze,2021)
网络架构
(Yann, 1998)首次引入CNN分辨手写数字,在整个图像空间共享卷积核参数实现平移等变性
(Alex, 2012; Karen, 2015)在大尺度图片分类数据集中使用堆叠的卷积块
GoogLeNet(Christain,2015)包含了多核路径
多路径卷积模块的效率在Inception系列网络(Christian,2016;)、ResNeXt(Saining, 2017)、 DPN(Yunpeng, 2017)、MixNet(Wenhai, 2018)、SKNet(Xiang,2019)网络中被验证
(Kaiming,2016)在ResNet网络中引入跳跃式连接卷积模块,这有助于训练更深的网络
(Gao,2017)在DenseNet中引入密集连接拓扑结构,把每个卷积模块同它前面的所有卷积模块相连
密集预测任务
- 目的:在特征图上进行像素级别的分类和回归
自注意力和变换器
- 卷积滤波器权重经过训练后被固定无法动态适应不同的输入,(Xu Jia,2016)使用动态滤波器,(Ashish Vaswani,2017)使用自注意力
- 非局部模块被(Xiaolong Wang,2018)引入解决时间和空间在大尺度上的依赖性,但是代价是计算成本和内存占用成本
- (Zilong Huang,2019)引入十字交叉路径Criss-cross减小注意力机制的复杂度
- 卷积滤波器权重经过训练后被固定无法动态适应不同的输入,(Xu Jia,2016)使用动态滤波器,(Ashish Vaswani,2017)使用自注意力
当前的不足
- 有许多特殊模块和运算方法是专门为CNN设计的因此没有在PVT中引入,例如:Squeeze-and-excitation network(SE)模块, Selective kernel network(SK)模块, 膨胀卷积模块, 模型精简模块,Network architecture search(NAS)模块
- 基于Transformer 的模型在视觉应用上起步晚可以应用于OCR, 3D和医疗图像分析
使用的方法
框架
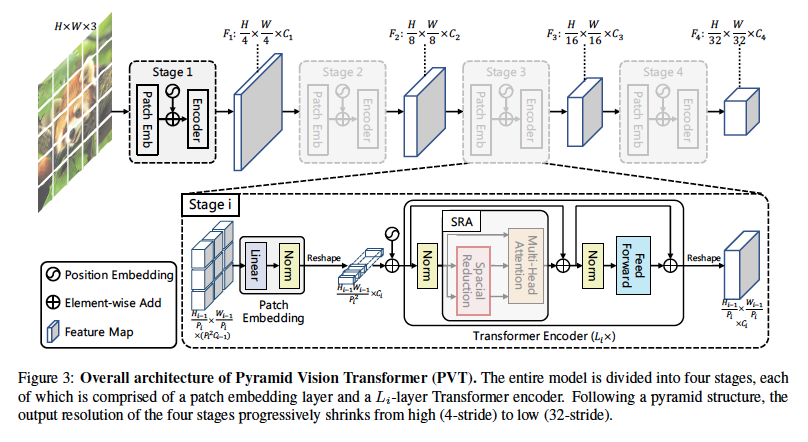
整体框架分成4个阶段,每个阶段都产生不同尺度的特征图,每个阶段都具有相似的结构,包括:1、分块嵌入层,2、若干Transformer编码层
结构(以第一阶段为例)
第一阶段输入图像HxWx3, 并分割成$\frac{HW}{4^2}$多个图块,每块大小4x4x3
将分割块展平进行线性投影变换得到嵌入块形状为$\frac{HW}{4^2}\times C_1$
将嵌入块和位置嵌入一起传入具有$L_1$层的Transformer编码器中
输出特征层$F_1$形状是$\frac{H}{4}\times\frac{W}{4}\times C_1$
以此类推,以上一阶段输出作为下一阶段的输入,选取的块的大小相对于原始图像分别是8x8,16x16,32x32像素,即第i阶段的块大小为$P_i$,得到的特征图为$F_i$:${F_2$,$F_3$,$F_4}$,特征图尺寸为$\frac{H}{8}\times\frac{W}{8}\times C_2$,$\frac{H}{16}\times\frac{W}{16}\times C_3$,$\frac{H}{32}\times\frac{W}{32}\times C_4$,
transformer的特征金字塔
- CNN的特征金字塔是使用不同的卷积跨步来实现,PVT是使用逐步缩小策略实现
transformer编码器
- Transformer编码器在第i阶段有$L_i$个编码层,每一个编码层又包含:1、注意力层,2、feed-forward层
使用spatial-reduction注意力层(SRA)替换传统多头注意力层(MHA),为了处理高分辨率特征图(4跨步特征图)
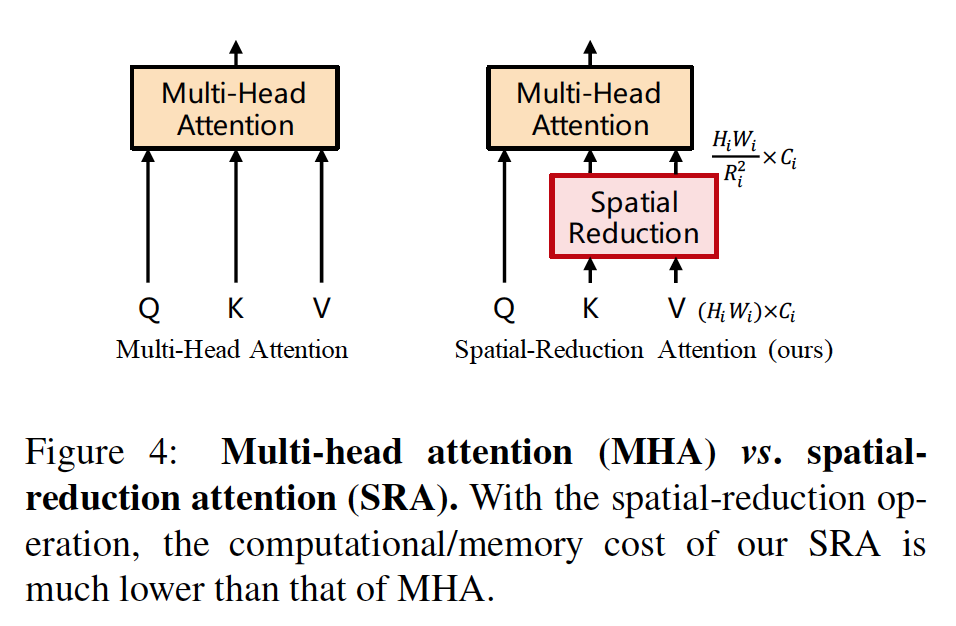
SRA特点:减小Key和Value输入的尺寸:符号说明:$Concat(\cdot)$链接操作;$Wj^Q\in\mathbb{R}^{C_i\times d{head}}$,$Wj^K\in\mathbb{R}^{C_i\times d{head}}$,$Wj^V\in\mathbb{R}^{C_i\times d{head}}$,$W^O\in\mathbb{R}^{Ci\times C_i}$,$W^S\in\mathbb{R}^{(R_i^2C_i)\times C_i}$都是线性投影矩阵;$N_i$注意力的头数;$d{head}=\frac{C_i}{N_i}$每个头的大小;$SR(\cdot)$减小空间尺度操作;$x\in\mathbb{R}^{(H_iW_i)\times C_i}$表示输入序列;$R_i$表示缩减比例;$Reshape(x,R_i)=\frac{H_iW_i}{R_i^2}\times(R_i^2C_i)$修改张量形状;$Norm(\cdot)$层归一化;$Attention(\cdot,\cdot,\cdot)$注意力得分
Deformable DETR: Deformable Transformers For End-to-End Object Detection
作者:Xinzhou Zhu,2020
解决的问题
- 改善空间分辨率问题和收敛慢问题
- Deformable DETR在检测小目标上优于DETR
- 结合了deformable convolution的稀疏空间采样和transformer的相关性建模能力
前人的工作以及优缺点:
- DETR(Nicolas Carion,2020)用于剔除目标检测中辅助成分的需求(例如,非极大值抑制),缺点是收敛慢、有限的特征空间分辨率,该模型结合了CNN模型和Transformer编解码模型,小目标效果差,优点就是具有元素间的相关性
- 目标检测使用了一些辅助成分(Li Liu,2020),例如锚点生成,基于规则的训练目标分配,非极大抑制
- deformable convolution(Jifeng Dai,2017)用于稀疏空间定位,因此高效、收敛快,缺点就是缺少元素间的相关性
- (Ashish Vaswani,2017)在transformer中引入自注意力和交叉注意力机制,缺点是时间成本和内存占用高
- 解决时间和内存的方式有三种
- 对关键点使用预定义(冻结参数)的稀疏注意力模式
- 将注意力模式限制在固定局部窗口中使用(Peter J Liu,2018a;Niki Parmar,2018;Rewon Child,2019;Zilong Huang;2019),优点是减少复杂度,缺点是丢失全局信息
- 以固定间隔方式设置关键点(Jonathan Ho,2019),优点:增加接受视野
- 允许少许特殊符号可以访问所有关键点(Iz Beltagy,2020),增加全局信息
- 学习依赖数据的稀疏注意力
- 基于注意力机制的局部敏感哈希映射LSH(Nikita Kitaev,2020),将查询元素和关键字元素映射到不同的区域
- (Aurko Roy,2020)用k-means聚类找到最相关的关键字元素
- (Yi Tay,2020a)对逐块的稀疏注意力学习块交换
- 研究自注意力机制的低级别性质
- 通过线性投影减少关键点数量(Sinong Wang,2020)
- 通过核函数近似计算自注意力(Krzysztof Choromanski,2020)
- 对关键点使用预定义(冻结参数)的稀疏注意力模式
- 多尺度特征表示
- FPN(Tsung-Yi Lin,2017a),自上而下生成多尺度特征图
- PANet(Shu Liu,2018b),自下而上生成多尺度特征图
- 从全局自注意力中提取所有尺度上的特征(Tao Kong,2018)
- U-shape模块融合多尺度特征(Qijie Zhao,2019)
- NAS-FPN(Golnaz Ghiasi,2019)、Auto-FPN(Hang Xu,2019)通过神经架构搜索自动进行交叉尺度连接
- BiFPN(Mingxing Tan,2020)
当前的不足
- 简单且高效的可迭代的边界框调优机制进一步改善性能
- 可将Deformable DETR应用到2阶段目标识别中,先生成推荐区域,再将推荐区域作为目标query送入解码器
使用的方法
- 应用在若干的采样位置点处,这些点作为特征图中关键特征点
- 使用图像尺度放缩而不是特征金字塔应用于deformable注意力模型
经典多头注意力结构
query元素代表了要输出的句子的目标单词,key元素代表输入句子中的单词,多头注意力模块根据测量的query-key对的相似性权重因子汇聚这些key。用$q\in\Omega_q$索引具有表达特征$z_q\in\mathbb{R}^C的$query元素;用$k\in\Omega_k$索引具有表达特征$x_k\in\mathbb{R}^C的$key元素,$C$是特征维度,$\Omega_q$和$\Omega_k$给出了query和key的元素总数;多头注意力特征计算:
这里$m$索引各个注意力头总共有M个注意力头,$Wm^\prime\in\mathbb{C_v\times C}$和$W_m\in\mathbb{C\times C_v}$是第m头待学习的矩阵,$C_v=C/M$,注意力权重$A{mqk}\propto \exp{\frac{zq^TU_m^TV_mx_k}{\sqrt{C_v}}}$满足归一化$\sum\limits{k\in\Omegak}A{mqk}=1$, 这里$U_m\in\mathbb{R}^{C_v\times C}$和$V_m\in\mathbb{R}^{C_v\times C}$同样是待学习的矩阵。为了消除不同空间位置的奇异性,表达的查询和关键字特征$z_q$和$x_k$需要和位置嵌入体做结合。
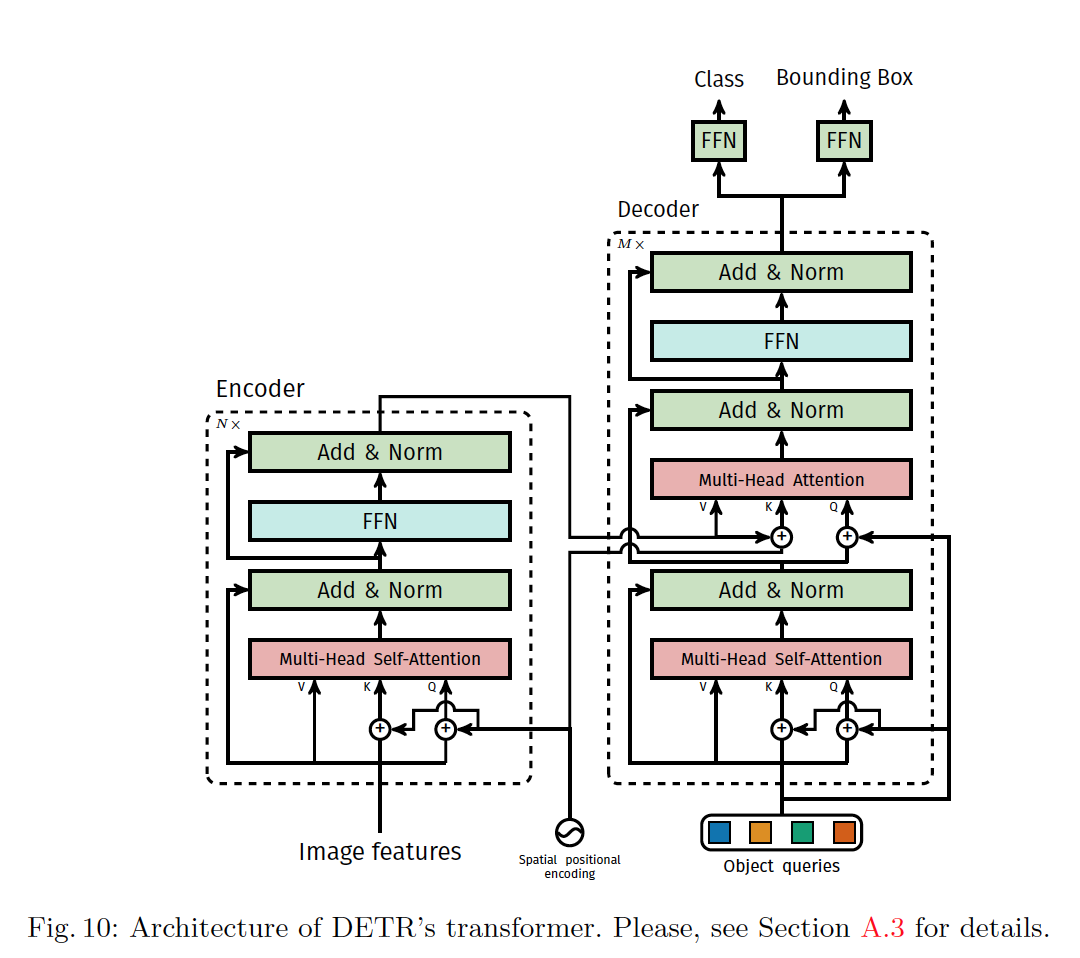
DETR Transformer编解码架构
采用Hungarian(匈牙利)损失函数借助二分(双边)匹配实现对每一个真实边框都有唯一预测值。用$y$表示ground truth集合,$\hat{y}={\hat{y}i}{i=1}^N$表示有N个预测值的集合,当$N$远大于图像中物体个数时,可以认为$y$集合也是由N个真实结果构成没有目标的结果被符号$\phi$填充。搜索N个元素$\sigma\in\mathfrak{G}N$的一个置换$\hat{\sigma}=\mathop{\arg\min}\limits{\sigma\in\mathfrak{G}N}\sum\limits_i^N\mathcal{L}{match}(yi,\hat{y}{\sigma(i)})$, (1)$\mathcal{L}{match}(y_i,\hat{y}{\sigma(i)})$是真值$yi$和具有索引$\sigma(i)$的预测值之间的逐对匹配代价函数;(2)第i个真值元素可以看成$y_i=(c_i,b_i)$,$c_i$是目标类别标签,符号$\phi$用N/A表示,$b_i={b_x,b_y,b_w,b_h}\in[0,1]^4$是向量记录了中心坐标和相对图像大小的高度和宽度;(3)对索引$\sigma(i)$的预测值,定义类$c_i$的概率为$\hat{p}{\sigma(i)}(ci)$,预测边框为$\hat{b}{\sigma(i)}$,定义:
这是真实框集合中的每一框和预测框集合中的每一个框匹配,损失值最小的预测框为该真实框的最佳匹配框,得到唯一匹配。匈牙利损失函数定义如下:
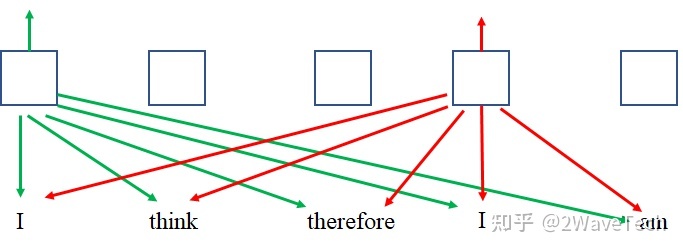
DETR主要使用Transformer编码解码架构将特征图像映射成一组待查目标对象的特征,feed-forward网络FFN用做回归分支预测边框坐标,线性投影用作分类分支预测目标类别。编码部分输入ResNet的生成的特征图,取query和key元素,它们都是特征图的每一个像素;解码部分输入包含来自编码部分的特征图和N个目标查询,有两个注意力模型:1、cross-attention,2、self-attention。在cross-attention中查询元素是从特征图中提取特征的N个目标查询,关键字元素来自于编码输出的特征图;在self-attention中,查询元素要获取他们的关系因此查询元素和关键字元素都来自于N个目标查询
Deformable transformer
单尺度Deformable attention
通过对每个查询元素只分配少许固定数量的关键字元素,这些关键字元素取自一个参考点附近的点,无需对所有关键字进行匹配,所以无视特征图尺度,已知特征图$x\in\mathbb{R}^{C\times H\times W}$,$q$是查询元素特征$z_q$索引以及分配的一个2维参考点$p_q$索引这里m是注意力头的索引,k是采样到的关键字元素索引,K是采样关键字总数,显然$K\ll HW$。$\Delta p{mqk}$和$A{mqk}$表示对第m注意力头、第k个关键字元素采样点的采样邻域半径和注意力权重,注:标量注意力权重$A{mqk}\in [0,1]$要归一化处理, $\Delta p{mqk}\in \mathbb{R}^2$没有约束范围,当$pq+\Delta p{mqk}$是小数时双线性插值可以使用,$\Delta p{mqk}$和$A{mqk}$是通过对查询元素特征$z_q$线性投影计算得到
多尺度Deformable attention
设${x^l}_{l=1}^L$是用于输入的多尺度特征图,$x^l\in\mathbb{R}^{C\times H_l\times W_l}$, $\hat{p}_q\in[0,1]^2$是每个查询元素q对应参考点的归一化二维坐标,坐标的归一化操作是对每一个尺度特征图进行, 模型公式为m是注意力头索引,l是输入特征图的尺度等级索引,k是采样点的索引,$\Delta p{mlqk}$和$A{mlqk}$表示在l层尺度上的特征图、对第m注意力头、第k个关键字元素采样点的采样邻域半径和注意力权重,$\phi_l(\hat{p}_q)$将归一化的坐标缩放回尺度为l的特征图中的坐标
编码器
编码器的输入输出都是具有相同分辨率的多尺度特征图,编码器的多尺度特征图${x^l}{l=1}^{L-1},L=4$取自ResNet的输出特征图$C_3$到$C5$分辨率分别为$H/2^3$到$H/2^5$,而最低分辨率的特征图$x^4$取自$C_5$特征图进行3x3步长2的卷积后得到的特征图$C_6$,所有的输入特征图的通道数都是256:
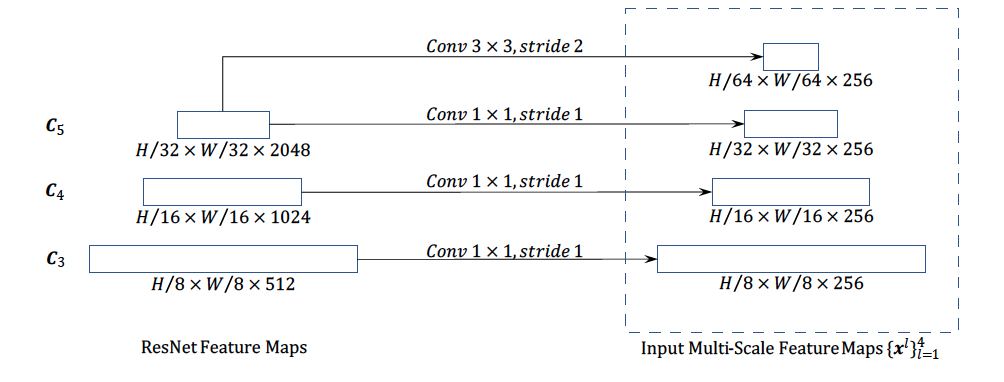
query和key元素都是多尺度特征图的像素,每个query像素的参考点就是其自身,为了识别每个query像素在哪个尺度图上,除了添加位置嵌入体外,需要添加尺度嵌入体$e_l$到特征表达中,区别是位置嵌入体是固定编码,尺度嵌入体${e_l}{l=1}^L$需要连同网络一起训练获取。解码器
包含cross-attention和self-attention,query元素在两类注意力机制中都是目标query,目标query在cross-attention中取自特征图,而key元素是编码器的输出特征图;在self-attention中,key元素是目标query。每个目标query参考点的二维归一化坐标需要经过线性投影和激活函数从目标query的嵌入体中给出
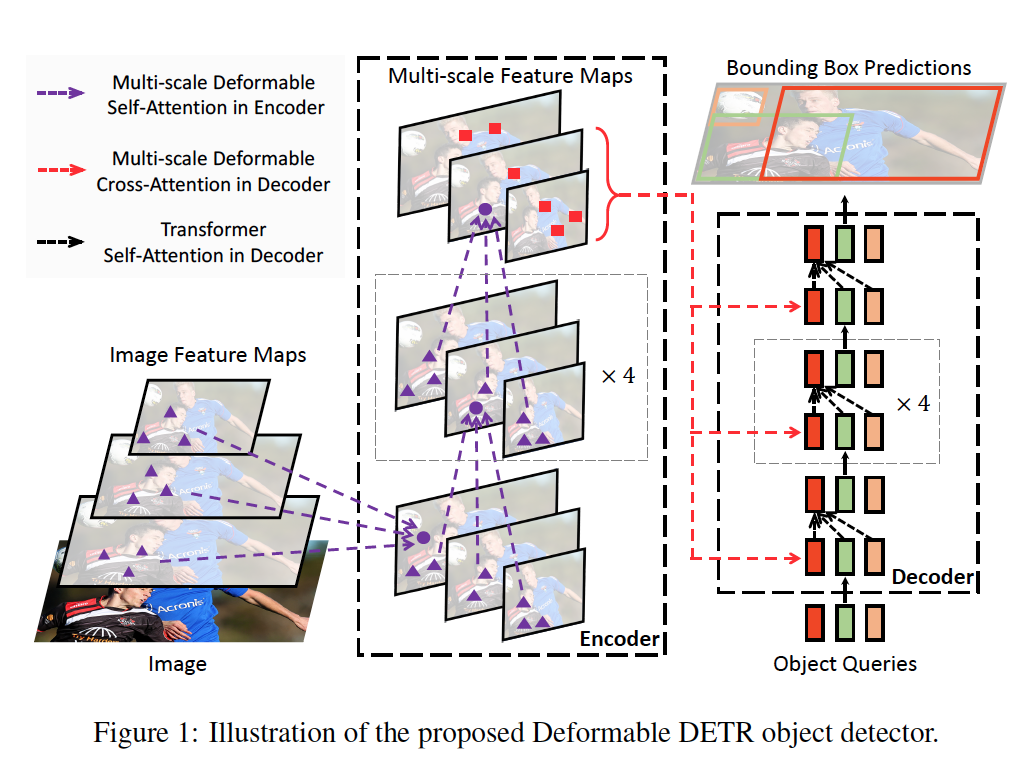
模型提取的图像特征都是在参考点周围的点,所以我们预测的边框都是相对于参考点的偏移量,参考点初始值都是边框的中心点
End-to-End Object Detection with Transformers
作者:Nicolas Carion,2020
解决的问题
- 提出目标检测新方法DEtection TRansformer(DETR):将目标检测看作单向集合预测问题
- 不再使用辅助设计成分,例如非极大值抑制抑制,锚点,是完全端到端的理念,流水化检测过程直接预测具有相对输入图像的绝对边框的检测集合
- 结合了二分匹配损失和具有并行解码(非自动回归)的transformer,损失函数对预测目标交换具有不变性,因此可以并行执行
- 对大目标具有更好的性能,可能是由于transformer的非局部计算
前人的工作及其优缺点:
- 以间接方式解决预测边框和种类任务,通过对大量推荐边框(Ren,S.,2015; Cai,Z.,2019)、锚点(Lin,T.Y.,2017)和窗口中心(Zhou,X.,2019;Tian,Z.,2019)定义回归和分类问题,通过后处理步骤削减近邻重复预测
- (Stewart,R.J.,2015;Hosang,J.H.,2017;Bodla,N.,2017,Rezatofighi,S.H.,2018)要么添加了其他形式的先验内容,要么在有挑战的基准样本上没有证明有强大竞争力
- (Stewart,R.J.,2015;Romera-Paraedes,B.,2015;Park,E.,2015)关注具有RNN自动回归解码
- 集合预测
基础的集合预测任务是多标签分类(Rezatofighi,S.H.,2017;Pineda,L.,2019)而目标检测要考虑元素间暗含的结构即识别近邻边框,因此不能用one-vs-rest方式处理问题。使用后处理方式例如非极大抑制处理近邻重叠问题;利用全局的对所有预测结果建立相互影响的推理方案规避这种冗余问题。集合预测可以使用致密的全连接网络(Erhan,D.,2014)、自动回归序列模型(recurrent neural network:Vinyals,O.,2016)。损失函数可以基于Hungarian算法(Kuhn,H.W.,1955)保证交换不变性和每个目标元素都有唯一匹配 - transformer和并行解码
Transformer是一个基于注意力机制的搭建模块用于机器翻译(Vaswani,A.,2017);注意力机制是一个神经网络层,可以从整个输入序列中汇集信息(Bahdanau,D.,2015);Transformer用在自动回归模型,根据之前的句子到句子模型(Sutskever,I.,2014)生成一个接一个的输出符号,这种方法缺点是推理成本(正比于输出长度)和很难批处理,所以需要开发并行序列生成,可以应用在语音(Oord,A.v.d.,2017)、机器翻译(Gu,J.,2018;Ghazvininejad,M.,2019)、单词表达学习(Devlin,J.,2019)、语音识别(Chan,W.,2020)。将transformer和并行解码结合权衡了计算成本和集合预测需要的全局计算能力 - 目标检测
目标检测根据一些初始猜测做预测,两阶段目标检测是根据推荐框(Ren,S.,2015;Cai,Z.,2019)做预测,单阶段目标检测是根据锚点(Lin,T.Y.,2017)或可能的目标中心网格(Zhou,X.,2019;Tian,Z.,2019)做预测,这类目标检测严重依赖初始猜测设置方式(Zhang,S.2019)。- 基于集合损失
早期的深度学习模型只用卷积和全连接层建模不同预测的关系并用辅助后处理改善性能;最近有些检测器使用真值和预测值之间的非唯一分配规则并结合NMS(Ren,S.,2015;Lin,T.Y.,2017;Zhou,X.,2019);可学习NMS方法(Hosang,J.H.,2017;Bodla,N.,2017)和关系网络(Hu,H.,2018)利用注意力显式建模不同预测间的关系,直接使用集合损失不在需要后处理步骤,但是也需要上下文特征例如推荐框坐标。 - 循环探测
端到端方法(Stewart,R.J.,2015;Romera-Paredes,B.,2015;Park,E.,2015;Ren,M.,2017)使用二分匹配损失以及基于CNN的编解码框架直接产生一组边界框,这些方法只在小样本数据中评估,基于的是自动回归模型没有利用具有并行解码的transformer。
- 基于集合损失
当前的问题
- 对小目标性能不佳,可以用FPN进行改善
- 长时间的训练
使用的方法
基于一组全局损失,通过二分匹配给出唯一预测,使用transformer编解码架构,需要一组固定数量的学习好的目标query, DETR会推理目标和全局图像的关系然后输出最终的预测集合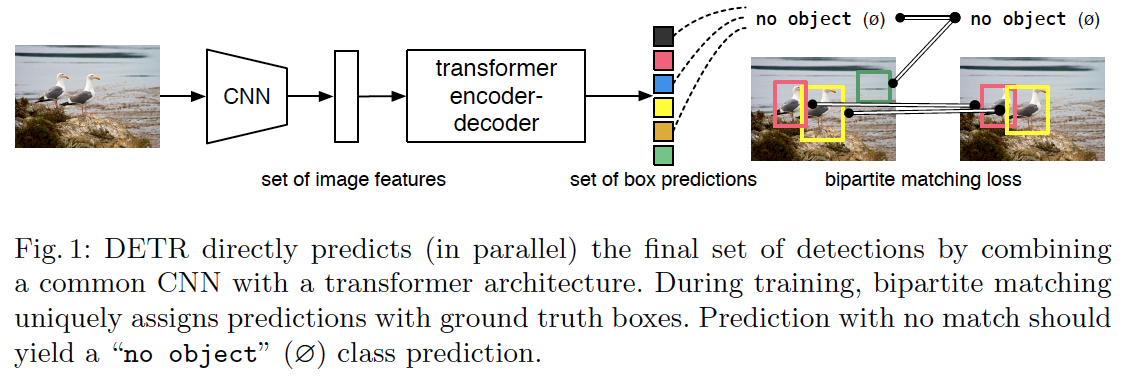
目标检测集合预测损失
DETR推理N个固定大小的预测结果集合,N明显多于图像中典型的目标数量,给出预测目标(类别,位置,大小)同真值比较后的好坏。用$y$表示ground truth目标集合,$\hat{y}={\hat{y}i}{i=1}^N$表示有N个预测值的集合,当$N$远大于图像中物体个数时,可以认为$y$集合也是由N个真实结果构成没有目标的结果被符号$\phi$填充。两个集合之间进行二分匹配,搜索N个元素$\sigma\in\mathfrak{G}N$的一个置换以得到最小代价$\hat{\sigma}=\mathop{\arg\min}\limits{\sigma\in\mathfrak{G}N}\sum\limits_i^N\mathcal{L}{match}(yi,\hat{y}{\sigma(i)})$, (1)$\mathcal{L}{match}(y_i,\hat{y}{\sigma(i)})$是真值$yi$和具有索引$\sigma(i)$的预测值之间的逐对匹配代价函数;(2)第i个真值元素可以看成$y_i=(c_i,b_i)$,$c_i$是目标类别标签,符号$\phi$用N/A表示,$b_i={b_x,b_y,b_w,b_h}\in[0,1]^4$是向量记录了中心坐标和相对图像大小的高度和宽度;(3)对索引$\sigma(i)$的预测值,定义类$c_i$的概率为$\hat{p}{\sigma(i)}(ci)$,预测边框为$\hat{b}{\sigma(i)}$,定义:
这是真实框集合中的每一框和预测框集合中的每一个框匹配,损失值最小的预测框为该真实框的最佳匹配框,得到唯一匹配。作用类似于用于匹配的启发式分配规则(匹配推荐框、锚点)区别只是一一匹配。根据二分匹配损失计算匈牙利损失函数(类别的负对数似然函数损失和边框损失线性组合),定义如下:
$\hat{\sigma}$是二分分配损失计算得到的最优预测值索引,注:$c_i=\phi$的样本通常比目标类别多很多,属于不平衡样本集,所以对于无目标类别将对数几率的权重减少到$1/10$。别的目标检测器对边界框的预测是基于和初始猜测边框的偏差,这里是直接生成边框预测,$\ell_1$损失的缺点就是有损失值的相对尺度问题,即大目标的大边框和小目标的小边框都可能产生相似的$\ell_1$损失,因此无法通过该损失区分大小尺寸,需要结合具有尺度不变性的交并比损失,注两个损失值还需要在批中样本上做归一化处理。
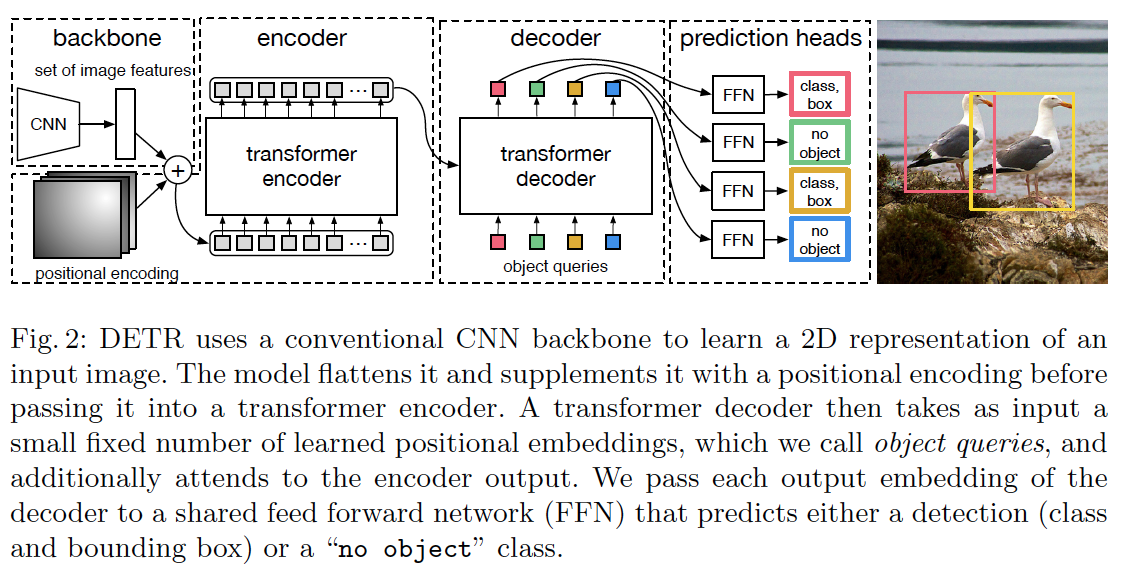
DETR框架
架构三部分组成:1、CNN骨架(提取出致密特征表达),2、transformer编解码,3、feed forward network,FFN(生成最终的预测)。
CNN
初始图片$x_{img}\in\mathbb{R}^{3\times H_0\times W_0}$, CNN输出低分辨率的激活图$f\in\mathbb{R}^{C\times H\times W}$,$C=2048$,$H,W=\frac{H_0}{32},\frac{W_0}{32}$
transformer编码器
- 用1x1卷积核减少高层激活图$f$的通道维度从$C$到$d$,新的特征图为$z_0\in\mathbb{R}^{d\times H\times W}$
- 编码器需要输入特征序列,将$z_0$的空间维度塌缩到一个维度$z_0\in\mathbb{R}^{d\times HW}$
- 编码器包含:1、多头注意力模块,2、feed forward网络层,编码器具有输入序列的交换不变性,因此需要向序列中添加固定位置嵌入体
transformer解码器
- 使用标准的多头自注意力和编解码注意力机制的transformer架构,但是区别是解码器每层并行解码N个目标,原来的模型是使用自动回归模型一次预测输出序列中的一个元素。
- 由于解码器也是对输入序列具有交换不变性,因此也需要让N个输入嵌入是不同的以生成不同结果,这N个输入嵌入体就是位置编码也称作N个目标查询,将他们添加到每一个注意力层的输入部分。
- N个目标查询被解码器转换成输出嵌入体
FFN网络层
- 具有ReLU激活函数的3层感知网络、线性投影层
- FFN将N个输出嵌入体独立分解成N个边框坐标和类别标签,即最终预测结果
- 边框坐标是根据输入图像做归一化
- 类别标签使用softmax函数给出
补充多头注意力层
多头注意力
有M个注意力头,每个头的维度是d,多头注意力是一个函数函数的输入输出如下,注:$d^\prime=\frac{d}{M}$,在花括号中列出了矩阵/张量的大小
展开为每个单头计算结果在特征阶次上的连接
$Xq$是长度为$N_q$的查询序列,$X{kv}$是长度为$N{kv}$的键-值序列,$T$是权重张量用于计算所谓的查询、键值、得分嵌入体,$L$是投影矩阵。多头自注意力是$X_q=X{kv}$的特殊情况
一般在得到$\tilde{X}_q$后还要在进行残差连接、dropout和层归一化处理
单头注意力
单头注意力的权重张量$T^\prime\in\mathbb{R}^{3\times d^\prime\times d}$,在计算单头注意力时还要引入位置编码嵌入体$Pq\in\mathbb{R}^{d\times N_q}$和$P{kv}\in\mathbb{R}^{d\times N{kv}}$。
首先计算添加位置编码后的查询、键值、得分嵌入体,计算复杂度$\mathcal{O}(d^\prime N_q\cdot d +d^\prime N{kv} \cdot d)$,$Q_i,K_i:\mathcal{O}(d^\prime d)$
$T^\prime$就是$T1^\prime\in\mathbb{R}^{d^\prime\times d},T_2^\prime\in\mathbb{R}^{d^\prime\times d},T_3^\prime\in\mathbb{R}^{d^\prime\times d}$在第0阶次上的连接,更一般情况:$T_1^\prime\in\mathbb{R}^{d{qk}^\prime\times d},T2^\prime\in\mathbb{R}^{d{qk}^\prime\times d},T3^\prime\in\mathbb{R}^{d_v^\prime\times d}$; $Q\in\mathbb{R}^{d{qk}^\prime\times Nq},K\in\mathbb{R}^{d{qk}^\prime\times N{kv}},V\in\mathbb{R}^{d_v^\prime\times N{kv}}$
再计算注意力权重$\alpha\in\mathbb{R}^{Nq\times N{kv}}$,通过query嵌入体和键值嵌入体点积运算和softmax运算
因此可以得到查询序列中的每个查询嵌入体和键值序列中的每个键值嵌入体之间的权重(相似性),计算复杂度$\alpha_{i,j}:\mathcal{O}(d^\prime)$:
最后计算带注意力权重$\alpha$的第i个嵌入体在特征维度上的加权得分分布,计算复杂度$\mathcal{O}(N_{kv}\cdot d^\prime)$
位置编码
为什么需要位置编码:
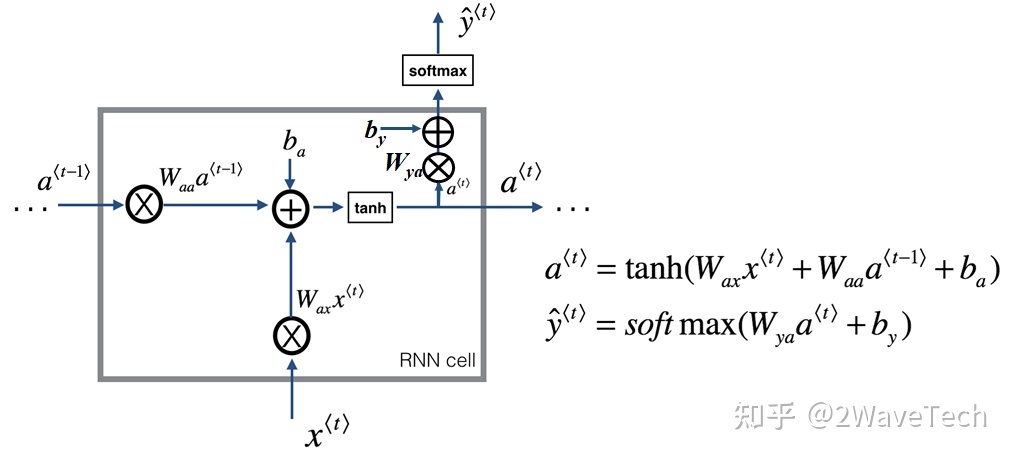
一个句子中各词的前后关系影响句子意思,在rnn中位置信息可以认为包含在状态量中;在注意力机制中所有token是被同时处理的而不是按时间逐token处理,所以如果不提供位置信息那么句子中出现相同的token对模型来说没有意思差别(关注度一样)因而会有相同输出。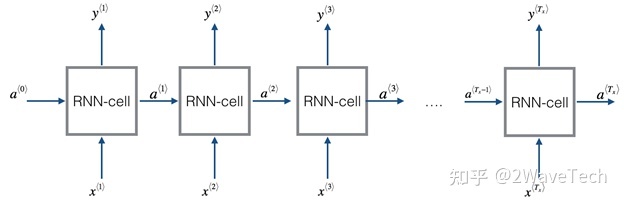
编码方法:
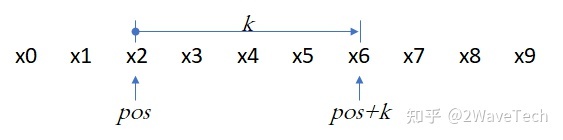
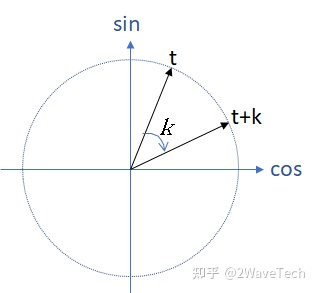
(1)静态位置编码:公式直接给出位置编码(a)简单位置编码(0,1):若单词的嵌入向量维度为n,那么可编码位置的句子长度$2^{n-1}\times 2$ (b)小数编码(码元$\in (0,1)$):若单词的嵌入向量维度为n,码元有m种,那么可编码位置的句子长度$2^{n-1}\times m$ (c)编码参数: 频率f:单位时间内信号的周期数:一段时间内的周期数/一段时间 时间步timesteps,每个时间步对应输入序列里的一个位置 每个单词的嵌入维度处有不同的信号周期,最高维到最低维度频率依次为$\frac{1}{2^{n-1}\times m}$,$\frac{2}{2^{n-1}\times m}$,...,$\frac{2^{n-1}}{2^{n-1}\times m}$,最高维度的的周期表示序列长度 (d)三角函数:该三角函数是句子中token位置的函数,同样角频率依旧随token的向量维度发生变化$p_i(t)=\sin(\omega_it)$,token的维度$[p_1,p_2,...,p_d]$ 如何确定向量的第i维的角频率$\omega_i$ (i)$f_i$是维度的指数函数,例如$f_i=\frac{1}{2\pi\cdot 10000^{i/d}}$,$\omega_i=\frac{1}{10000^{i/d}}$,所能支持的句子长度是10000$\cdot 2\pi$ (ii)$p_i(t)=\sin(\frac{t}{10000^{i/d}})$ (e)交替三角函数: $$\left[\begin{array}{c} p_1\\ p_2\\ \cdots\\ \cdots\\ p_d \end{array}\right] = \left[\begin{array}{c} \sin(\omega_1t)\\ \cos(\omega_1t)\\ \sin(\omega_2t)\\ \cos(\omega_2t)\\ \cdots\\ \cdots\\ \sin(\omega_{d/2}t)\\ \cos(\omega_{d/2}t) \end{array}\right]$$
(i)目的:位置在pos+k的位置编码可以用pos上的位置编码线性表示
解得
线性变化矩阵是一个旋转矩阵
(2)动态位置编码:训练产生位置编码,编码是一个可训练变量
的最大长度
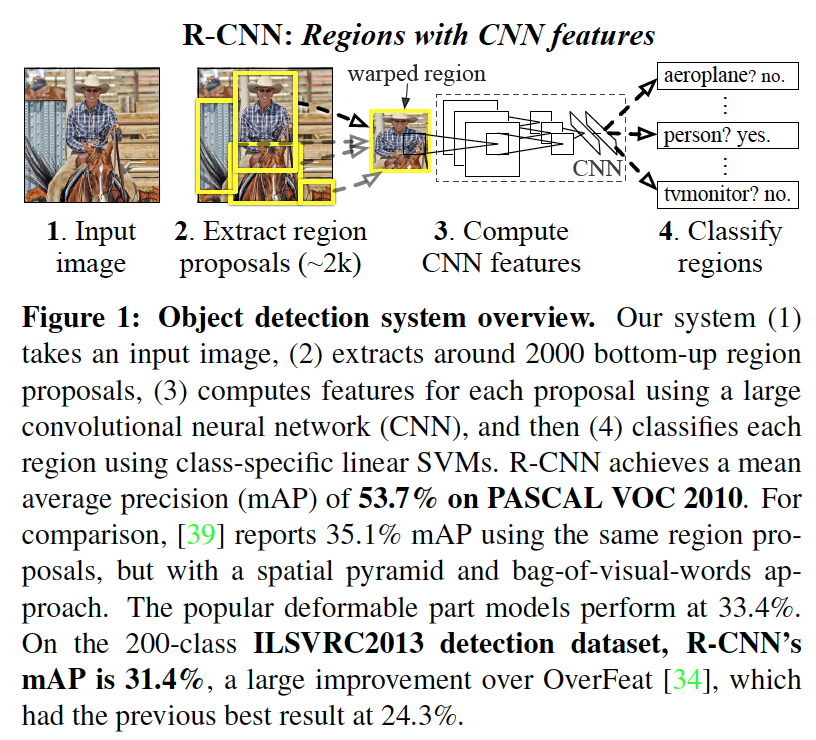
Rich feature hierarchies for accurate object detection and semantic segmentation
作者:Ross Girshick, 2014
解决的问题
- 采用区域结合CNN特征的方法
- 提升mAP性能至少30%
- 解决CNN在分类任务的结果如何推广到目标识别的任务中
- 第一个展示了CNN在目标检测中相比HOG类型的特征检测有高性能
- 用深度网络定位目标
- 只用少许标记数据训练高泛化能力的模型, 在辅助数据集ImageNet Large Scale Visual Recognition Challenge
(ILSVRC)进行有监督的预训练,再在小量数据集上做专门的精细调节
前人的工作及优缺点:
- 特征问题、视觉识别任务使用了SIFT(D. Lowe.,2004)和HOG(N. Dalal,2005)方法,缺点识别性能差
- (K. Fukushima,1980)提出一种用于模式识别的可以分级和保持平移不变的模型,缺点是不是监督训练算法
- CNN在1990年代曾被大量使用后来随着支持向量机的出现而没落(Y. LeChun,1998)
- 2012年(A. Krizhevsky,2012)根据CNN得到的图片分类的显著准确度再次使CNN被关注,这归因于CNN在120万图片上训练以及修改非线性和dropout规范化
- 将框定位看作是回归问题(C. Szegedy,2013),缺点效果不好mAP 30.5%
- 滑动窗口检测范式用在特定的目标种类上例如脸、行人(H. A. Rowley,1998; P. Sermanet,2013;P. Sermanet,2014), 缺点:为了维持高空间分辨率,这类CNN只能有两层卷积和池化层,如果网络单元太高,这类单元相对输入图像有大的接收视野和跨步,所以精确定位存在问题
- 使用区域识别范式解决CNN定位问题(C. Gu,2009;J. Uijlings,2013;J. Carreira,2012)
- 面对少量标记数据传统解决方案是使用非监督的预训练然后再有监督的精细调节(P. Sermanet,2013)
当前的问题
有监督的预训练和特定领域的精细调节范式对各种稀疏目标检测是有效的,是否对密集预测有效需不知道
使用的方法
由三个模块构成:
- 生成独立于类别的推荐区域: objectness(B. Alexe,2012), selective search(J. Uijlings,2013), category-independent object proposal(I. Endres,2010), constrained parametric min-cuts(J. Carreira,2012)
- 从每个区域中用CNN提取固定长度的特征矢量,
- 将候选区域的图像转化成一种样式,可以兼容CNN架构(需要接受227x227大小的输入)
- 对任意形状区域的多个可能变换,我们只选择最简单的,不管候选区域的大小和方框形状,我们封装方框内的所有像素到需要的大小
- 用特定类别的线性支持向量机区分每个推荐区域
网络架构
参考(A. Krizhevsky,2012)网络架构
边框回归
参考(P. Felzenszwalb,2010),区别就是一个是回归CNN计算的特征,一个是DPM计算的特征。输入N个训练对$\left{(P^i,G^i)\right}{i=1,\cdots,N}$,这里$P^i=\left(P_x^i,P_y^i,P_w^i,P_h^i,\right)$是第i个推荐框的中心坐标和宽长元素,$G^i=\left(G_x^i,G_y^i,G_w^i,G_h^i,\right)$是第i个真实框的中心坐标和宽长元素。通过推荐的边框学习映射函数$d{\star}(P^i)$,并给出预测结果,这里$\star$表示$x,y,h,w$
边框$P^i$在CNN的pool$5$输出特征记作$\phi_5(P^i)$, 映射$d{\star}(P^i)$的用可学习的线性函数替换为$d{\star}(P^i)=\vec{w}\star^T\phi5(P^i)$,通过训练学习$\vec{w}\star$
Selective Search for Object Recognition
作者:J.R.R. Uijlings,2012
解决的问题
- 解决在目标识别任务中生成可能的目标位置的问题
- 得到由数据驱动的、独立于类别的、高质量的定位位置
- 结合分割内容和详细搜索方式,提出数据驱动的selective search,受自下而上的分割启发,文章用图片结构生成目标位置;受详细搜索启发,文章要捕获所有可能的目标位置;替换单一采样技术,用多种采样技术解释尽可能多的图片条件
前人的工作及优缺点:
- 目标在被识别前应该先被描绘,即分割好目标轮廓(P. Arbelaez,2011; D. Comaniciu,2002;P. F. Felzenszwalb,2004;J. Shi,2000)
- 图片的内容和目标类别的不同使用方式都是分等级的,这阻止了目标取得唯一分割,得是多尺度的分割,当然有专门目的的目标除外
- 通过使用单一策略实现分割也是不可行的,即单一视觉特征(颜色、纹理、区域)无法解决分割的模糊性
- 多个不同特征区域目标可能组合成一个目标,前提是要有先验的识别知识,因此这是传统分割方法的逆过程,即同过目标的识别来确定目标的位置(目标轮廓)
- 目标识别方面的改进方法取得进步(N. Dalal,2005;P. F. Felzenszwalb,2010;C. Gu,2009;P. Viola,2001),借助学习得来的样貌模型详细的搜寻可以实施,即图像中的每个位置都要检测一遍不至于漏掉任何潜在的目标位置,缺点是计算成本高昂,均匀采样生成的边框很明显不全都支持一个目标
- exhaustive search
当目标在任意位置和尺度上被定位时,很自然要搜索每一个位置(N. Dalal,2005;H. Harzallah,2009;P. Viola,2004)
滑动窗口技术使用粗搜索网格和固定轮廓比例,也使用弱分类器(SVM)和经济的图像特征例如HOG(P. F. Felzenszwalb,2010)
使用轮廓样貌模型引导搜索(C. H. Lampert,2009),借助分支和界限技术,优点是削弱对常规网格、固定尺度和固定轮廓比例的限制,同时也减少要访问的位置数量 - segmentation
(J. Carreira,2010;I. Endres,2010)借助分割生成一组不依赖于类别的目标,缺点是依赖单一算法识别区域,随机设置了许多初始前景和背景种子
当前的问题
使用的方法
设计思路
- capture all scales: 使用分级算法
- diversification: 使用多种策略解决问题
- fast to compute: selective search要被用于目标识别框架中,所以不能成为计算瓶颈
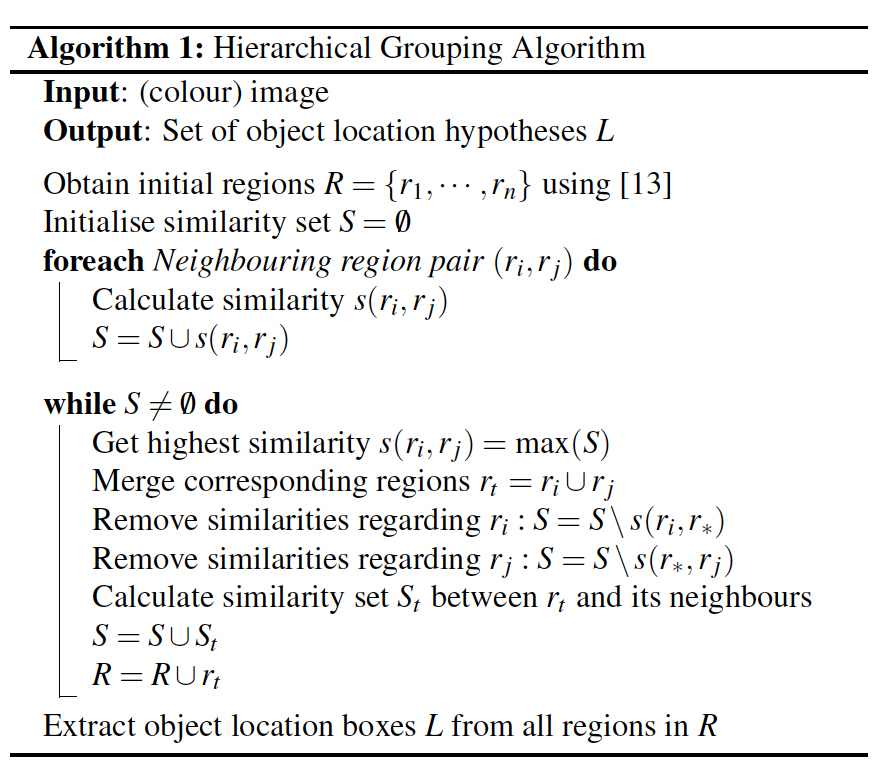
Hierarchical Grouping
自下而上的组合区域,通过持续的组合过程在所有尺度上生成位置直到整张图变成一区域,初始区域设定是使用(P. F. Felzenszwalb,2004)方法。
- 创建初始区域集合
- 贪心算法组合区域
- 计算相邻区域对之间的相似性,并存储到相似性集合中
- 当相似性集合不为空,取最高相似性区域对,融合两个区域成一个区域,从相似性集合中去除和被融合的两个原区域相关的相似性元素,计算新融合的区域和它相临区域之间的相似性,并将所得相似性元素存入相似性集合中,将新融合区域加入到区域集合中
- 根据假定的目标位置数目L,从区域集合中提取L个位置边框
计算相似性利用多种互补测量方法,相似性是基于可以通过等级传递的特征。
diversification strategies
- 使用多种具有不变性的颜色空间
在不同颜色空间使用Hierarchical Grouping,1、RGB,2、intensity,3、Lab, 4、rgI,5、HSV,6、normalized RGB,7、C,8、H 使用不同的相似性测量
- 颜色相似性,每个区域对每个颜色通道计算分布直方图,将强度分成25个区间,再将组合到一起,得到区域$r_i$的颜色分布直方图$C_i=\left{c_i^1,…,c_i^n\right}$,rgb三通道$n=75$;使用$L_1$范数归一化$C_i$
两个区域的直方图交集区域融合后颜色直方图的层级间传递 - 纹理相似性,使用SIFT测量结果表示纹理,区域$r_i$在每个方向和每个颜色通道提取10个间隔的分布直方图$T_i={t_i^1,…,t_i^n}$,$n=3\times8\times10$,$L_1$归一化分布直方图
两个区域的直方图交集区域融合后颜色直方图的层级间传递 - 大小相似性,让小区域提早融合,定义成区域在图像中的占比
- 区域间隙相似性,两个区域之间的缝隙,定义成图像占比,首先定义包含两个区域的最小方框$BB_{ij}$
- 综合各相似性
- 颜色相似性,每个区域对每个颜色通道计算分布直方图,将强度分成25个区间,再将组合到一起,得到区域$r_i$的颜色分布直方图$C_i=\left{c_i^1,…,c_i^n\right}$,rgb三通道$n=75$;使用$L_1$范数归一化$C_i$
使用不同的初始区域
- 使用不同的阈值参数
Fast R-CNN
作者:Ross Girshick,2015
解决的问题
- 单阶段目标识别
- 新的共享卷积特征计算方法可以进行后向传递
前人工作及优缺点:
- 目标检测需要对若干候选目标位置进行评估,为了高效卷积特征需要在各位置间共享(K. He,2014;P. Sermanet,2014),缺点是他们的方法限制了误差的反向传递
- 目标检测候选框位置需要调优提升精度(R. Girshick,2014;P. Sermanet,2014)使用的是分阶段学习
- R-CNN缺点
- 多阶段训练:1、用交叉熵微调ConvNet,2、线性支持向量机
当前的问题
使用的方法
CvT: Introducing Convolutions to Vision Transformers
作者:Haipin Wu,2021
解决的问题
- 将卷积网络的性质(平移、放缩、扭曲不变性)引入transformer性质中(动态注意力、全局纹理、范化性)
- 移除transformer中的位置编码
X-volution: On the Unification of Convolution and Self-attention
作者:Xuanhong Chen,2021
解决的问题
- 建立多分支互补模块,每个模块由卷积和自注意力机制组成,这样能够统一局部和非局部特征的相互影响
- 通过从局部区域到全局区域传递上下文关系近似自注意力模式,计算复杂度$O(n)$,方式叫做Pixel Shift Self-attention(PSSA)
- 多分支拓扑结构就可保留条件优化特性也能够捕获长周期关系
- 多分支结构可以通过网络再参数化(Xiaohan Ding,2021)转换成一个标准的卷积操作
- 卷积和自注意力可以分别视为静态卷积(卷积核是内容独立的)和动态卷积(卷积核是内容依赖的)
- 整合基础卷积和注意力机制成一个原子操作计算模块
前人的工作及优缺点:
- 卷积拥有诱导偏置项,它是局部的和各向同性的,这赋给卷积操作条件优化和平移等边特性,但也抑制了长周期的关系,这种关系有助于视觉理解(Irwan Bello,2019)
- 自注意力拥有很低的诱导偏置项,释放更多空间探索数据的内部特性(Patrik Esser,2020),但是缺少局部优势使自注意力优化困难,自注意力严重依赖于在大样本上的预训练
- 当前优秀的网络要么使用卷积要么使用注意力,并没有一种高效的方式兼容两种计算模式
- 卷积操作的效率受限于局部接受视野(Xiaolong Wang,2018)
- 多头自注意力能够学习卷积特征,卷积和注意力在某种条件下可以相互转化(Jean-Baptiste Cordonnier,2020)
- (Irwan Bello,2019)将卷积和注意力通过直接连接相结合
- 没有偏置给予自注意力更多的空间探索复杂关系,例如:长周期依赖,非各向同性语义,强局部依赖性(Patrick Esser,2020)
- 自注意力很难优化,需要更长的训练周期和复杂技巧(Ashish Vaswani,2021; Xizhou Zhu,2020; Ze Liu,2021; Nicolas Carion, 2020)
使用方法
卷积模型:
特征张量$X\in\mathbb{R}^{C_i\times H\times W}$,$C_i$表示输入通道数,$H$是图片高度,$W$是图片宽度。卷积操作的输出结果$Y\in\mathbb{R}^{C_o\times H\times W}$,$C_o$表示输入通道数, 整个卷积过程如下:$W\in\mathbb{R}^{C_o\times C_i\times K\times K}$是卷积核,$K$是卷积核窗口大小,$B\in\mathbb{R}^{C_o}$是偏移矢量,$\Delta_K\in\mathbb{Z}^2$表示$K\times K$卷积窗口中所有偏移量坐标集合。卷积是一个一阶线性权重运算。
自注意力模型:
自注意力不像卷积不能直接计算图像张量,需要先将输入特征张量变为矢量$X\in\mathbb{R}^{C\times L}$, $L=H\times W$表示矢量长度, $W^Q,W^K,W^V$分别表示查询字,关键字,数值嵌入变换矩阵,是一个空间共享的线形矩阵。输出的预测如下:$\bar{W}(X)$表示最后等价的自注意力的系数矩阵,该矩阵可以视为卷积核大小可变,卷积核的元素依赖于输入特征的动态卷积矩阵,因此是一个高阶全局运算。
全局自注意力的近似
$\bar{W}(X)\sim O(n^2)$所以关键问题就是近似$\bar{W}(X)$,给一个特征张量$X$,在给定位置处的特征矢量表示为$x_0$,注意力逻辑$s_0$公式表达为:这里$\alphat=\omega^q\omega^k\omega^v x_t$,$\Omega$表示全局区域,$A$表示以$x_0$为中心的局部区域
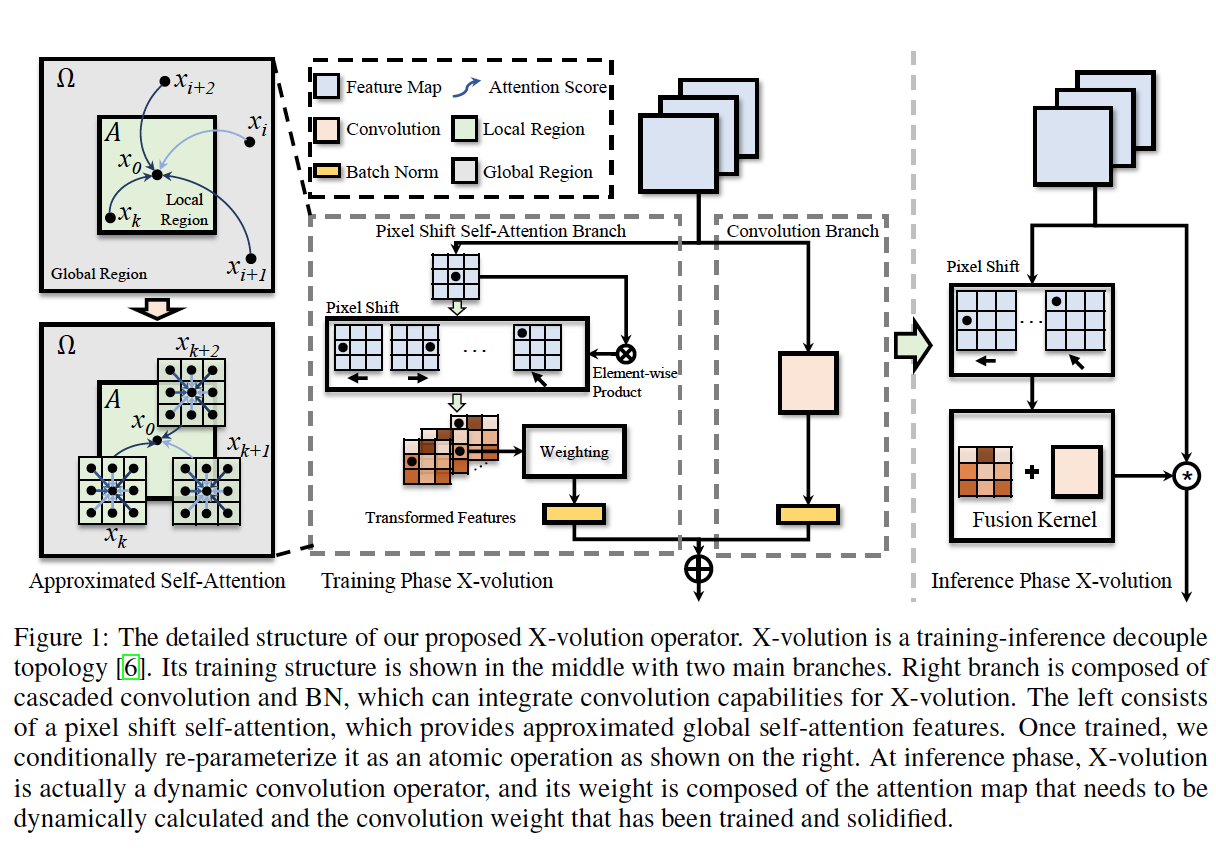
图中灰色区域为全局区域,绿色为局部区域,因为图片具有马尔可夫性(Philipp Kr\”{a}henb\”{u}hl,2011),$x_0$特征可以被局部区域的像素线性近似表示为$x_0\simeq\sum\limits{x_k\in\AA}\beta_kx_k$,$\beta_k$是线性权重。将$x_0$线性近似表达替换注意力逻辑中的非局部区域项:不失一般性,添加局部区域$A$的注意力逻辑项同时让线性权重置零,因此非局部区域就纳入到局部区域的边界像素接受视野范围内:
根据图片的马尔可夫性,假设任意$x_k\in A$,则$x_i$(远离$x_k$)和$x_k$之间的相互作用关系变弱:
这里$U(x_k)$表示$x_k$的局部区域,在用上式替换原式非局域项:
$
近似方案就是Pixel Shift self-Attention(PSSA),基于像素移动和卷积近似全局注意力:
1. 沿指定方向(上下左右)移动特征图L个像素
2. 在原特征图和移动后的特征图之间进行逐元素的乘积获取变换后的特征,变换后的特征其实表达了邻域大小为L的上下文关系,如果通过不同尺度则可以建立全局区域的上下文关系
3. 对这些变换后的特征加权求和(可以用卷积实现)来近似自注意力特征
4. 移动,逐元素相乘,加权求和的计算复杂度都是$O(n)$
4.统一卷积和自注意力:X-volution
. 粗糙的拓扑结合(例如尺度堆叠和特征连接)阻碍卷积和自注意力融合成一个原子操作(在一个模型中同时应用卷积和注意力)。
. 公式$\ref{eq:approx-atten}$是一个空间变换卷积,全局的逐元素相互作用(点乘)可以通过局部逐元素相互作用的传递方式来近似表达。因此可以统一成卷积模式
. 换个角度看,卷积亦可视为一个空间不变偏移项的自注意力
. 将卷积和自注意力操作结合成一个多分支拓扑,如上图,左分支由级联的Pixel Shift Self-Attention和batch-normalization构成,右分支是级联的卷积和batch-normalization构成
. 多分支拓扑的结合两种运算是一个粗颗粒度的结合,导致的结果就是使网络复杂以及变得非常规, 实际应用中是通过尺度叠加使用PSSA,并且叠加结构中的加权运算被忽略掉,因为尺度叠加暗含了加权领域像素的运算
. 训练阶段多分支模型:
$$y_0=\underset{PSSA\; Branch}{\underbrace{\sum\limits_{x_i\in A} \alpha_i<x_0,x_i>}} + \underset{Conv\; Branch}{\underbrace{\sum\limits_{x_i\in A} \omega^cx_i+b^c}} = \sum\limits_{x_i\in A}\omega^q\omega^k\omega^vx_i<x_0,x_i> + \sum\limits_{x_i\in A} \omega^cx_i+b^c$$
这里$\omega^c$是卷积权重,$b^c$是卷积的偏置项
$$y_0 = \sum\limits_{x_i\in A} (\omega^q\omega^k\omega^v<x_0,x_i> + \omega^c)x_i + b^c = \sum\limits_{x_i\in A}(\omega^\mathcal{A}(x_0,x_i)+\omega^c)x_i+b^c$$
这里$\omega^\mathcal{A}(x_0,x_i)\overset{def}{=}\omega^q\omega^k\omega^v<x_0,x_i>$表示依赖内容/动态系数,$\omega^c$表示独立于内容/静态系数,一旦训练完成卷积权重就被确定了
. 该卷积可以广泛使用于卷积中,被称作结构再参数化(Xiaohan Ding,2021)

Conformer: Local Features Coupling Global Representations for Visual Recognition
作者:Zhiliang Peng,2021
解决问题
- 提出混合卷积和自注意力网络结构增强学到的特征表达,融合了不同分辨率下的局部和全局表示特征
使用方法
- 框架:模型主干、卷积和注意力双分支、融合单元、两个分类器
- 主干:7x7,stride=2卷积->3x3,stride=2最大池化层
- 主干->双分支:12个卷积和transformer块
- 融合单元:连接两分支融合特征,解决特征图和嵌入体之间的对应关系
- 卷积特征(WxHxC)->图像块嵌入((K+1)xE):1x1卷积将C和E对齐,down-sampling将(WxH)和(K+1)对齐,最后将特征图和嵌入体求和得到新的嵌入体
- 图像块嵌入((K+1)xE)->卷积特征(WxHxC): up-sampling将(K+1)和(WxH)对齐,1x1卷积将E和C对齐,将嵌入体和特征图叠加成新的特征图
- 训练阶段使用两个交叉熵损失计算各分支,推理阶段简单叠加两个分类器
Multi-stream neural network fused with local information
and global information for HOI detection
作者:limin Xia
field: human-object Interaction, target is to detect all the tripls in an image
solve: model can detect the HOI(human-object Interaction) categories based on local region information and global region information
drawback:
method:
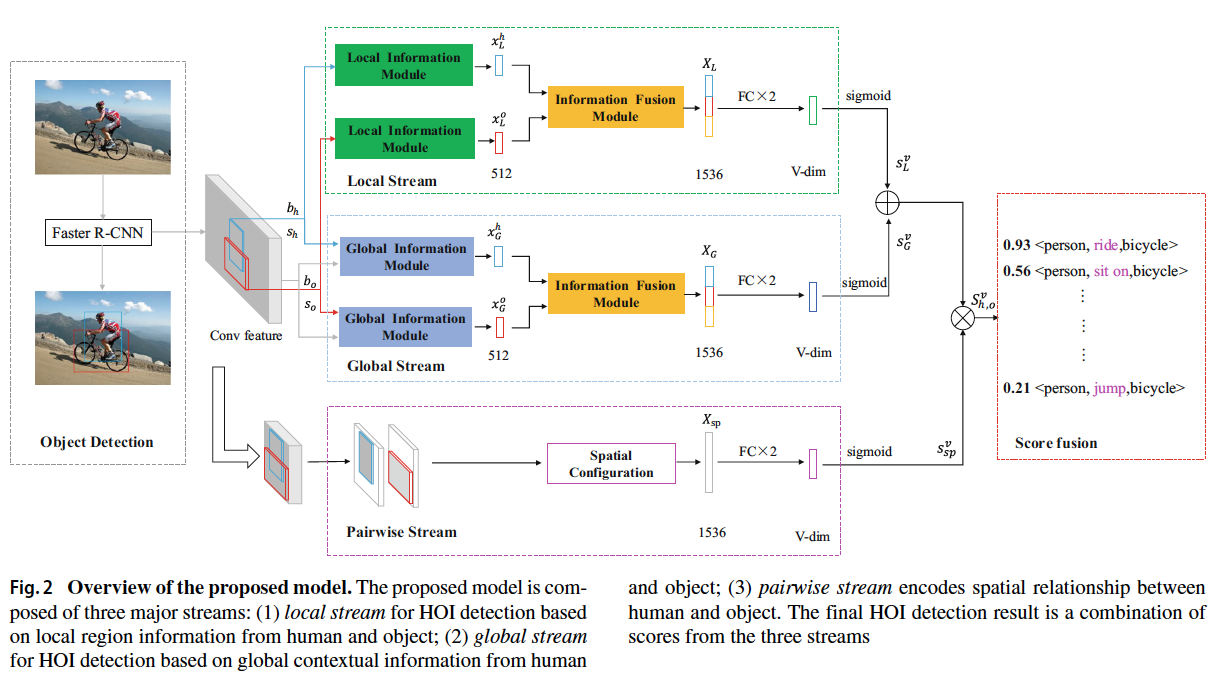
architecture: propose multi-stream neural network architecture fused with local region information and global contextual information
main step:
- object detection: Faster R-CNN detect the human/object instances; predict the boxes and confident scores of human and object, respectively
- HOI prediction:
combine the human-object box pair as input of multi-stream neural network to generate the final interaction score
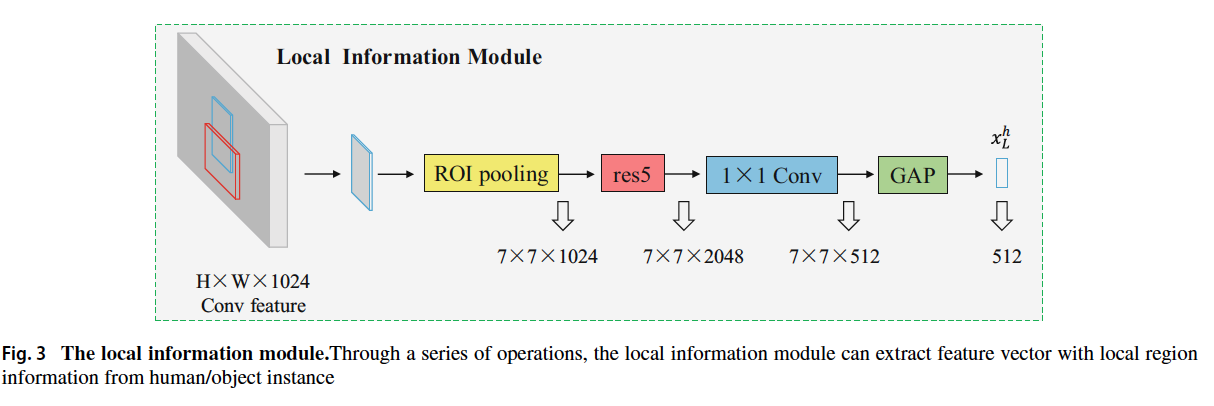
local information module
- crop the bounding box of the object in the feature map as input to the local information module
- apply pooling operation on the input feature map to get the 1024 dimentional feature map with size of 7x7
- above feature map sends to residual block to get the 2048 dimensional feature map
- use the 1x1 convolution operation to transform the feature map into a 512 dimensional depth
- above feature map is operated by global average pooling to get the feature vector with size of 512, which will contain the appearance information of object
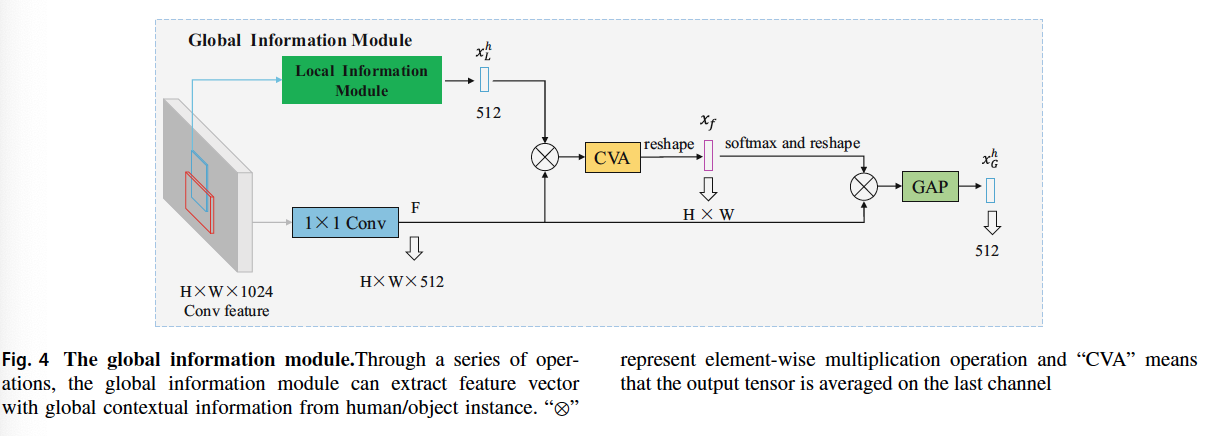
globle information module
- employ the local information module as a part of the global information module to get the local vector as a multiplier
- use 1x1 convolution operation to transform the global feature map into a 512 dimensional space $F$ as an another multiplier
- perform an element-wise multiplication operation on the global feature and local feature vector, and then output a feature vector of size HxW through channel value averaging (CVA) and reshape operation
- The feature vector of size HxW is reshaped to HxW two dimensional feature map through the softmax and reshape operation, which is an instance-centric global feature attention map $A$
- modulate the global feature $F$ with the global feature attention map $A$ and use the global average pooling (GAP) to generate the global feature vector, which not only contains the appearance information of object, but also fuses object-centric global contextual information